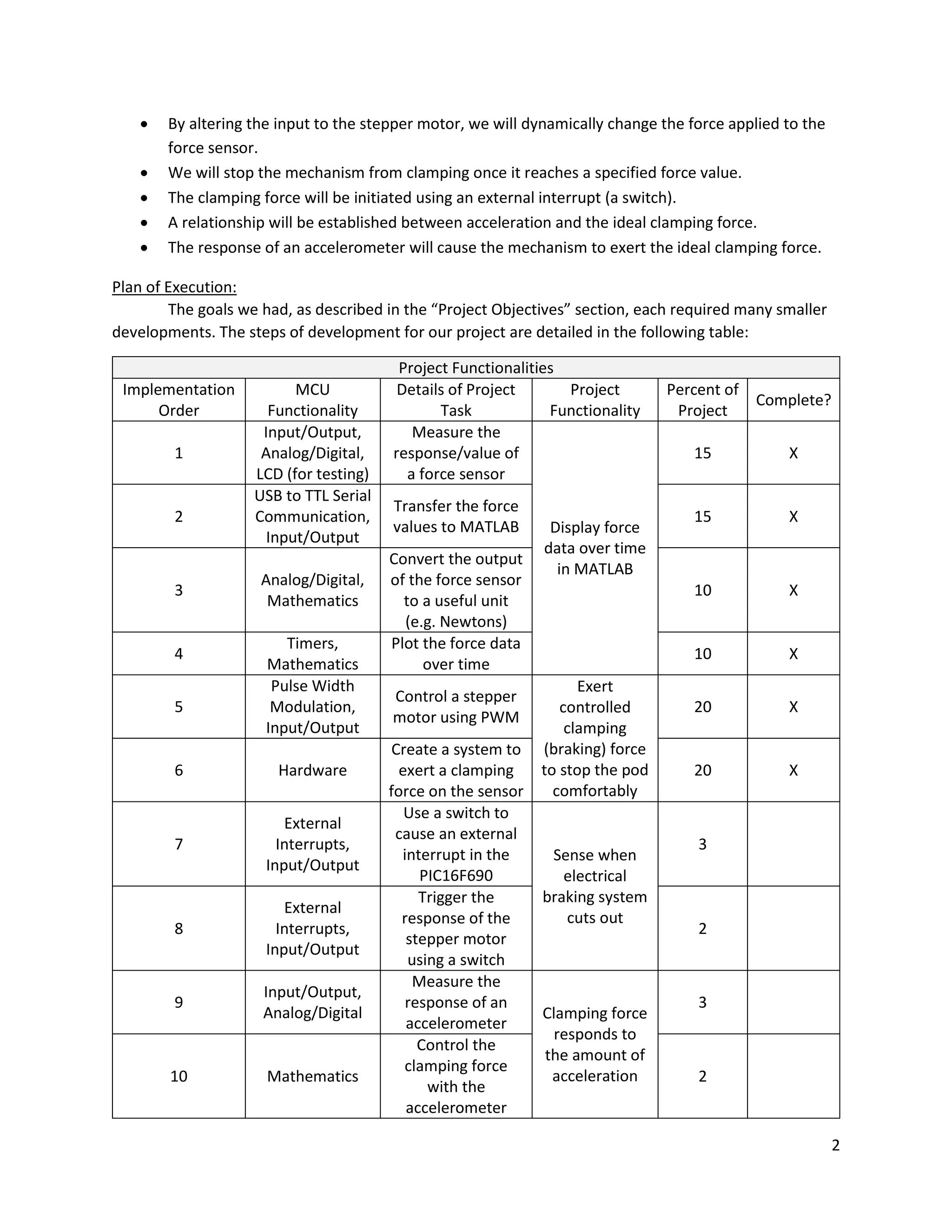
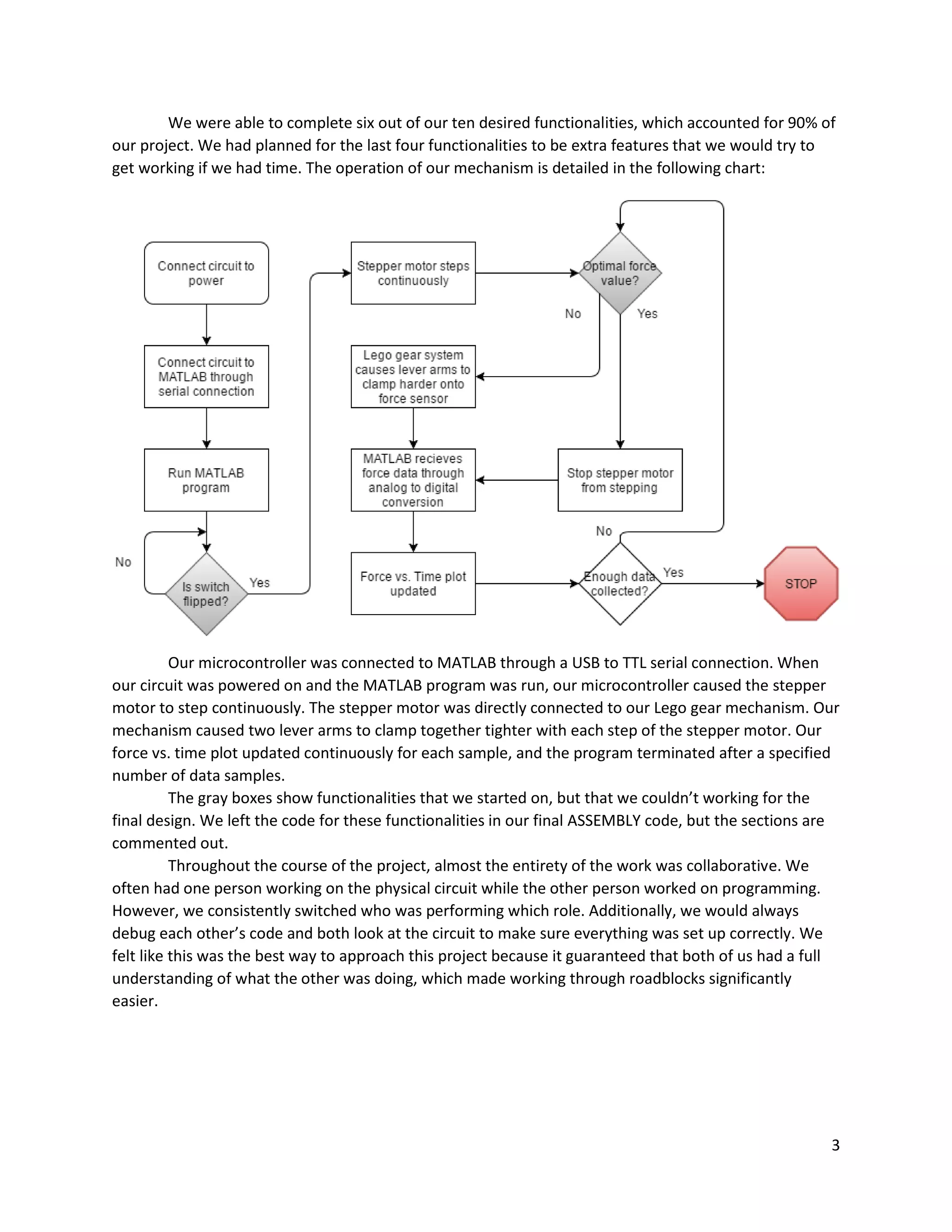
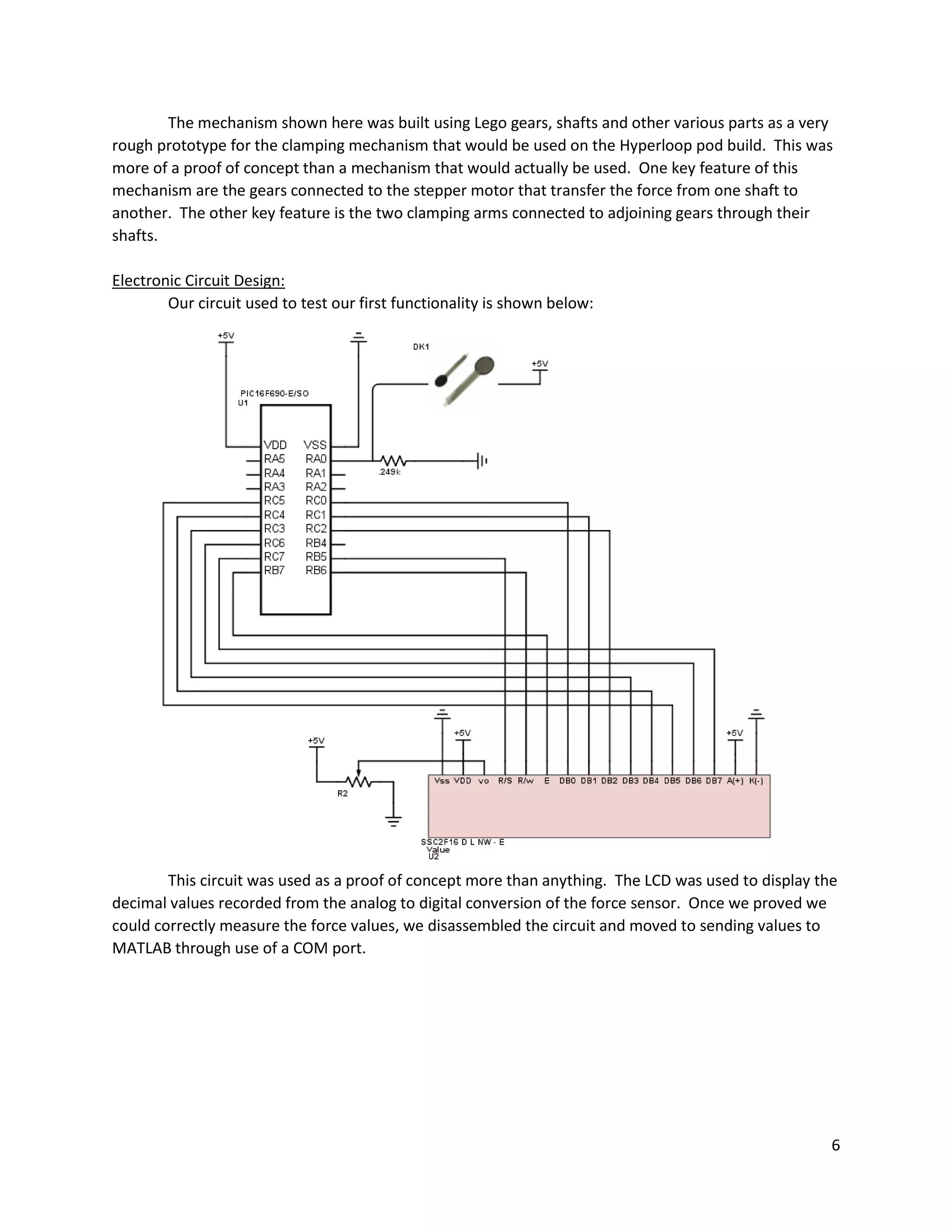
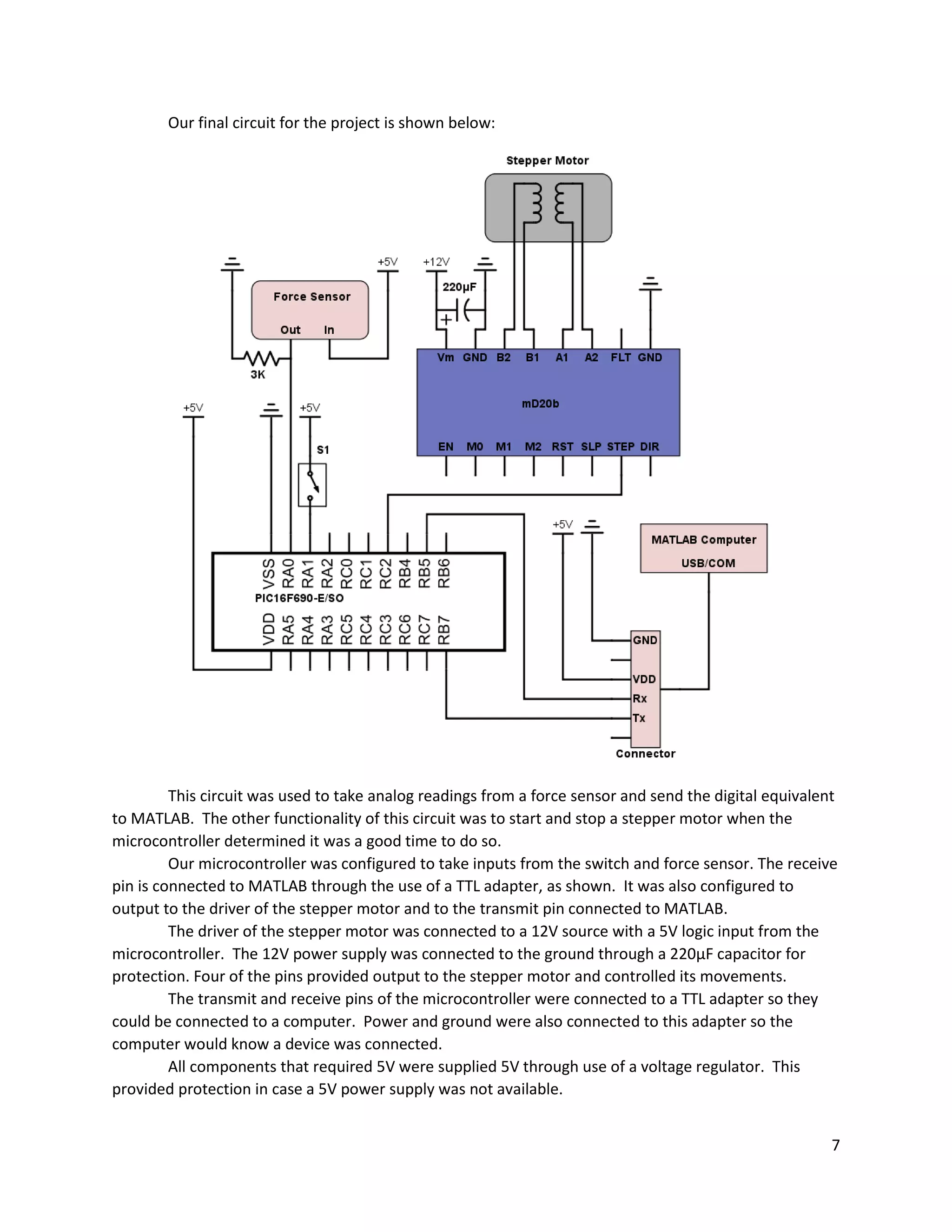
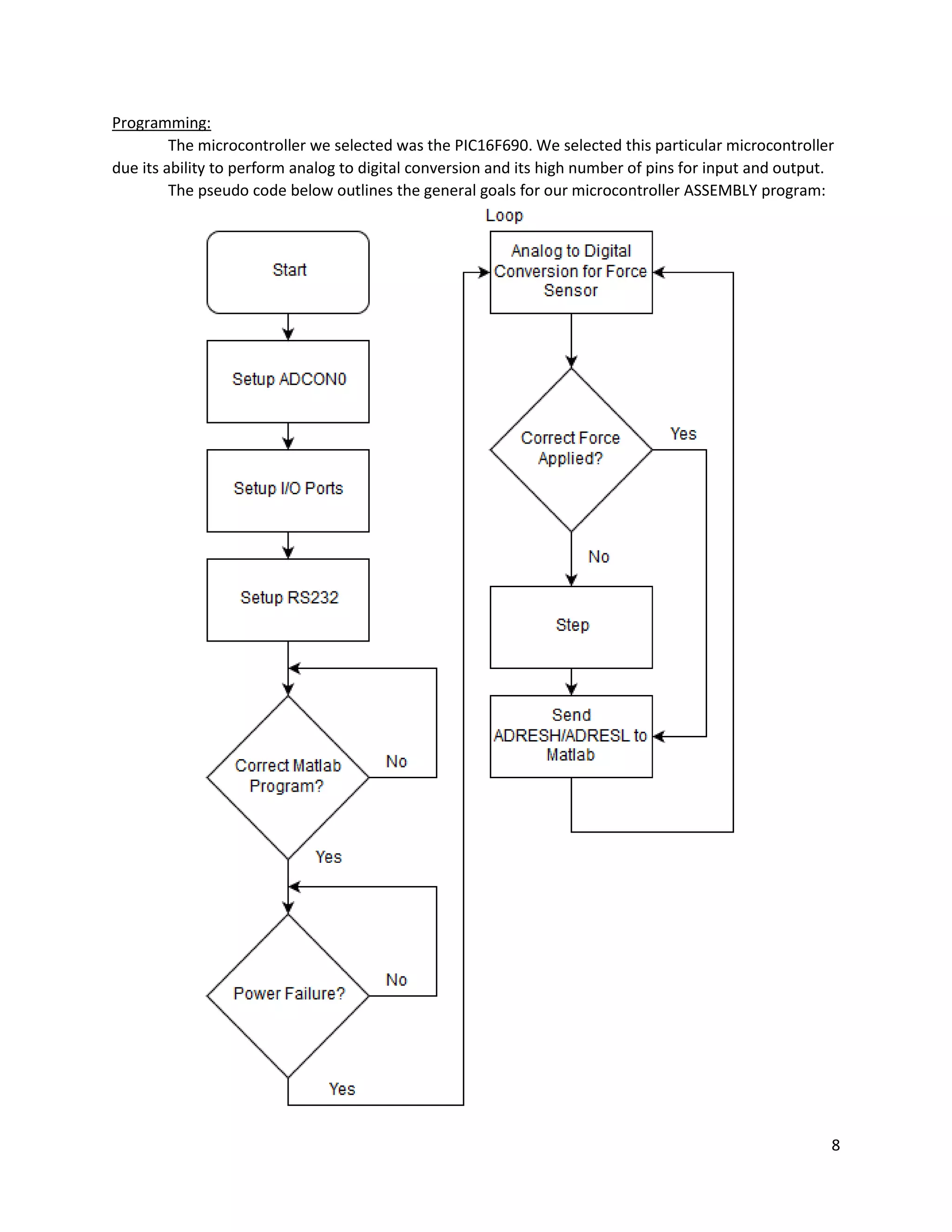
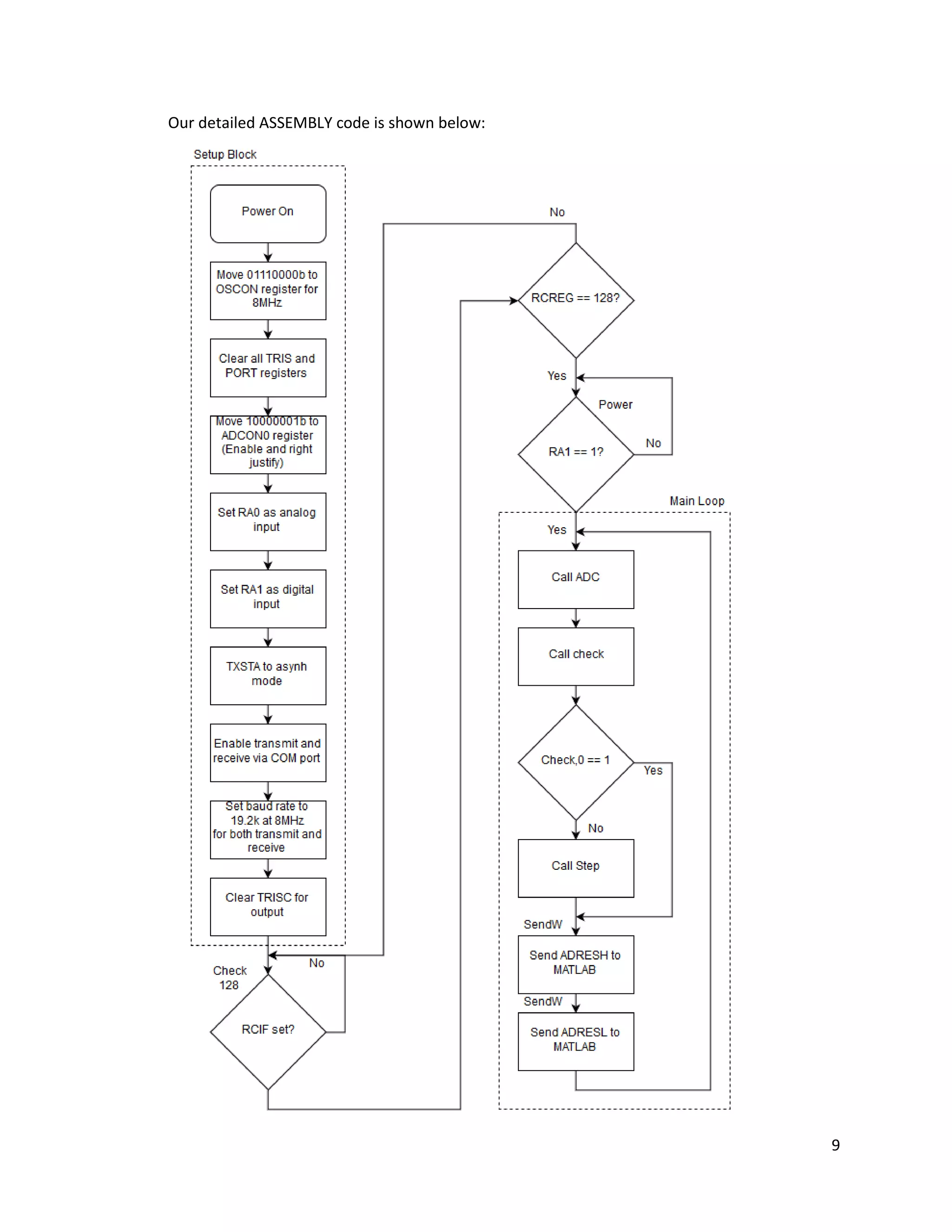
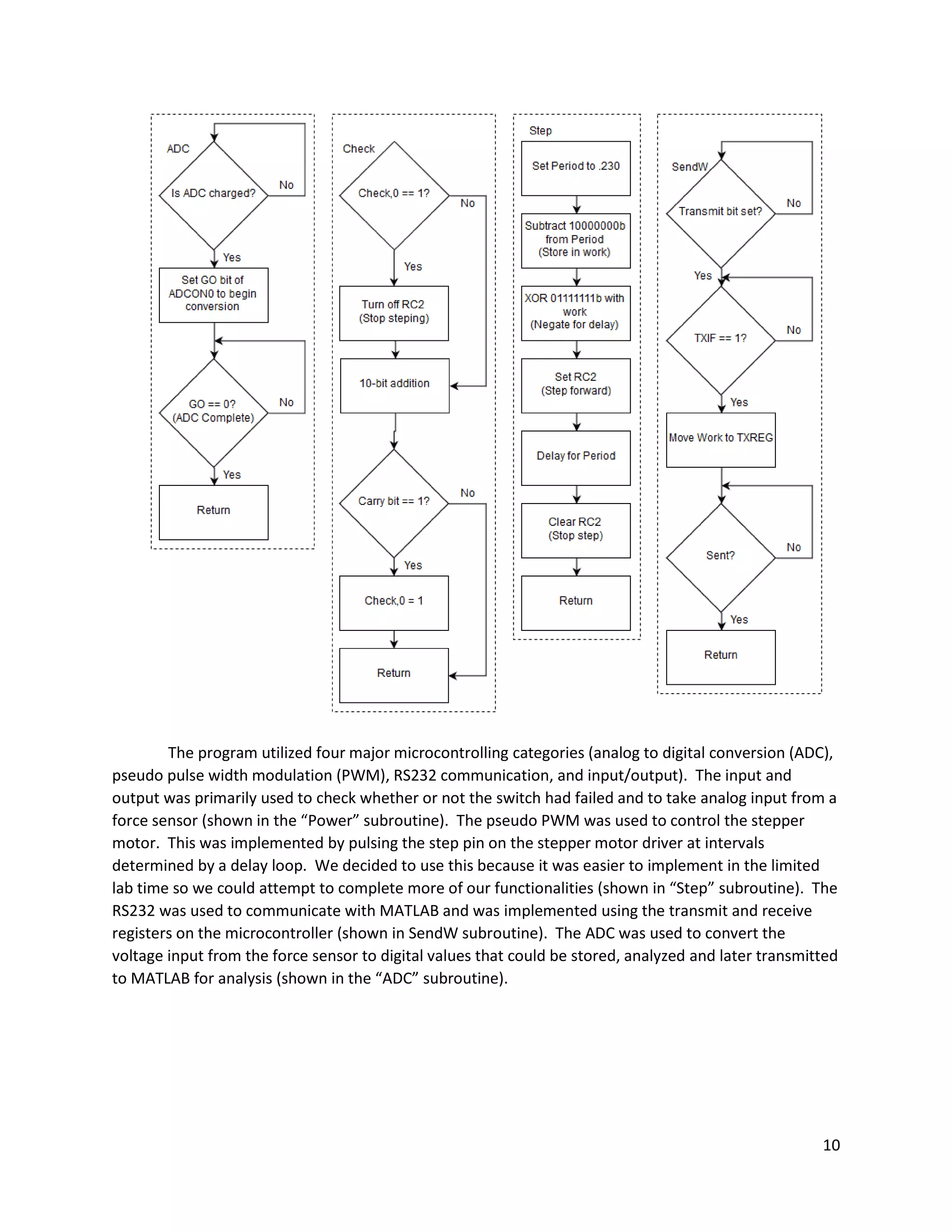
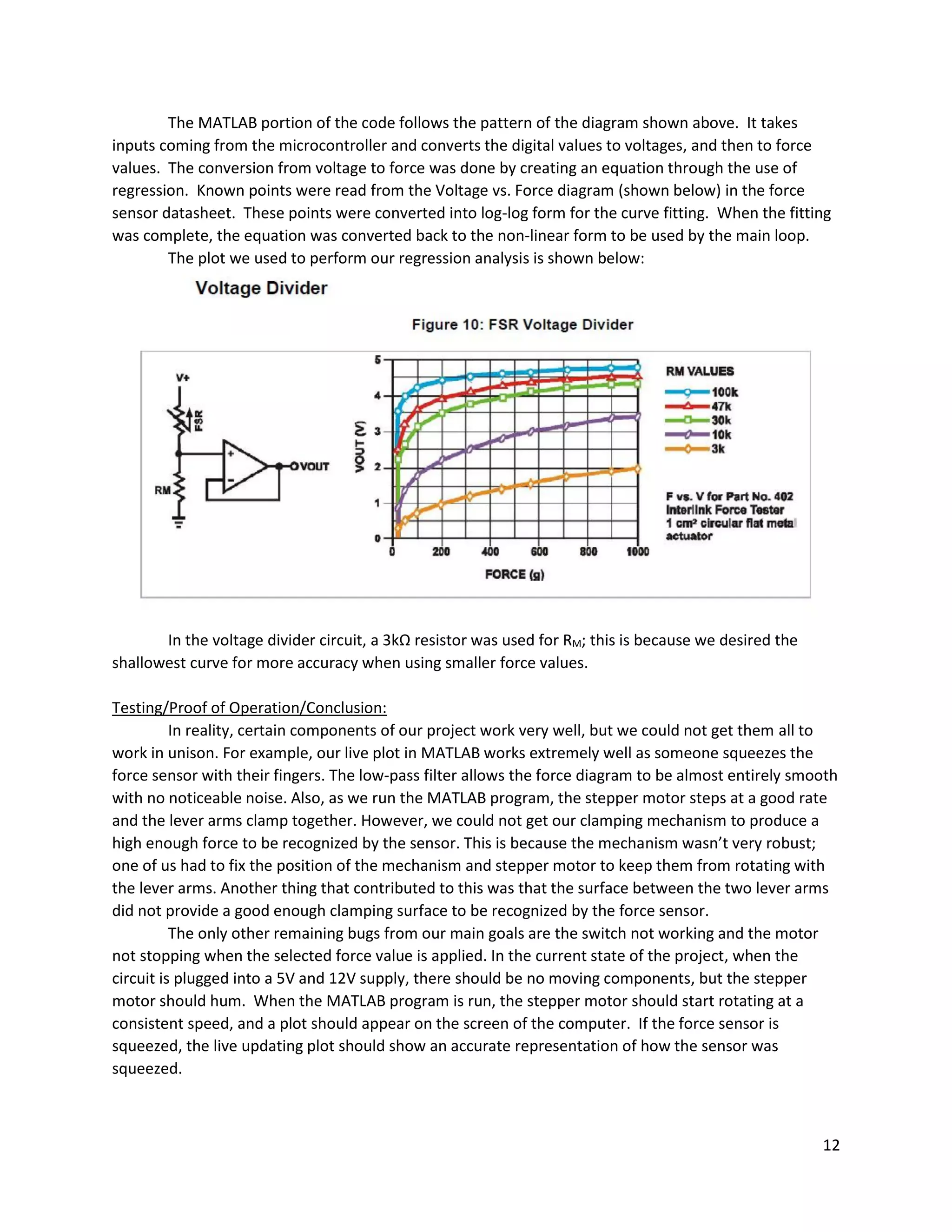
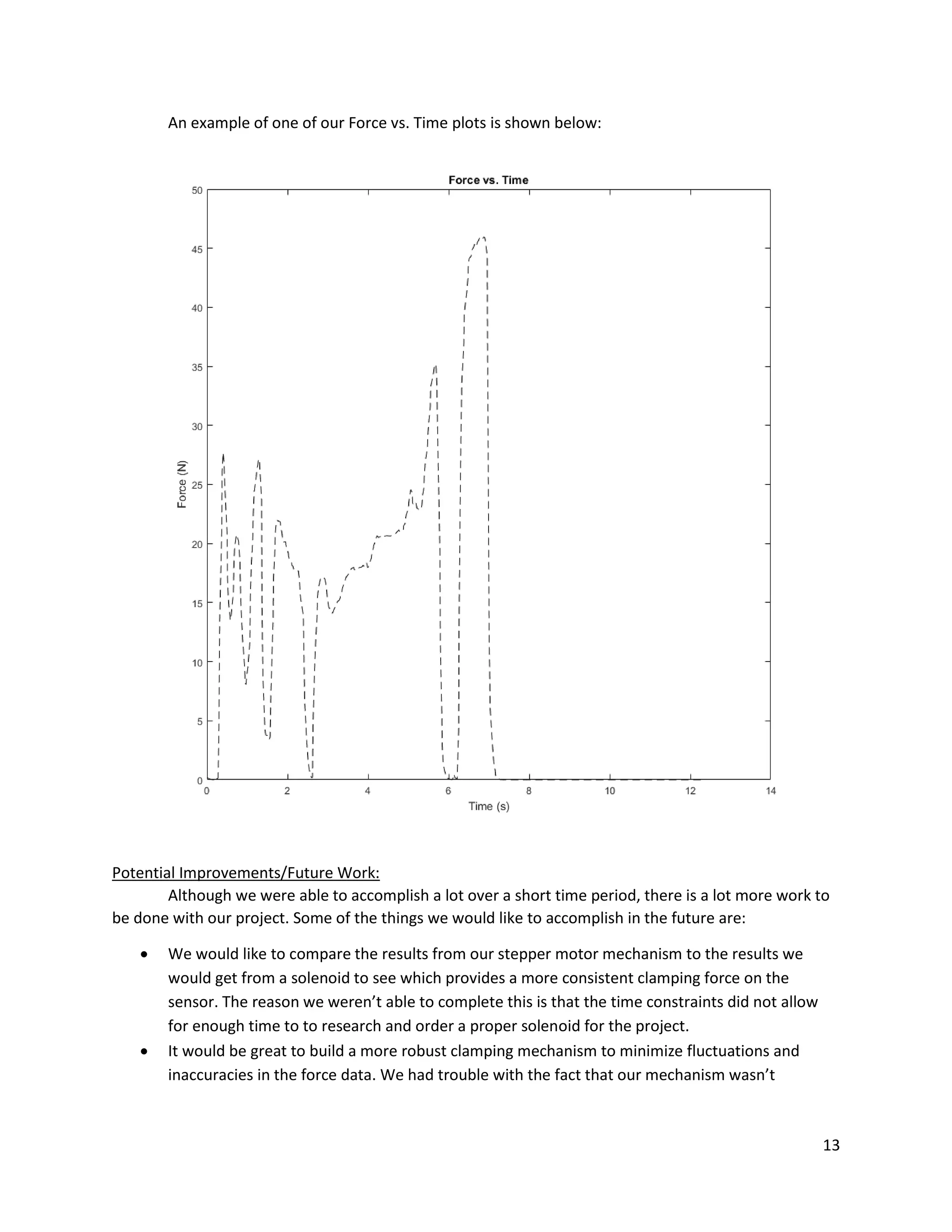
This document describes a student project to design an emergency braking system for a Hyperloop pod. The system uses a stepper motor mechanism to apply a controlled clamping force on a force sensor. The force values are sent to MATLAB via a microcontroller for visualization. The goals were to control the clamping force and stop it at a specified force value. While most functionalities worked individually, integrating them proved challenging within time constraints. Potential improvements include optimizing the clamping mechanism and simulating electrical failure with a switch.
![25
MATLAB Code – Regression.m:
%Names: Jacob Grendahl, Tristan Roberts
%Date: May 6, 2016
%Class: AME 487
%Assignment: Final Project
%File: Regression.m
%
%Description:
% This file is resopisible for building the equation that converts
% voltage to force values.
F=9.8/1000*[20 50 95 195 310 440 570 705 900 1000];
V=[0.35 0.5 0.7 1 1.2 1.45 1.625 1.8 1.95 2];
X=log(V);
Y=log(F);
Z=[ones(length(V),1) X'];
A=Z'*Z;
b=Z'*Y';
a=Ab;
x=0:0.1:5;
y=exp(a(1)).*x.^a(2);
Func=@(x)exp(a(1)).*x.^a(2);
plot(V,F,'or',x,y,'-k');
xlabel('Voltage Out (V)');
ylabel('Force (N)');
title('Force vs. Voltage Output');](https://image.slidesharecdn.com/ddf3549b-2c02-4abe-9127-e5003cd161e0-160825040156/75/Team2_Final_Project_Documentation-25-2048.jpg)