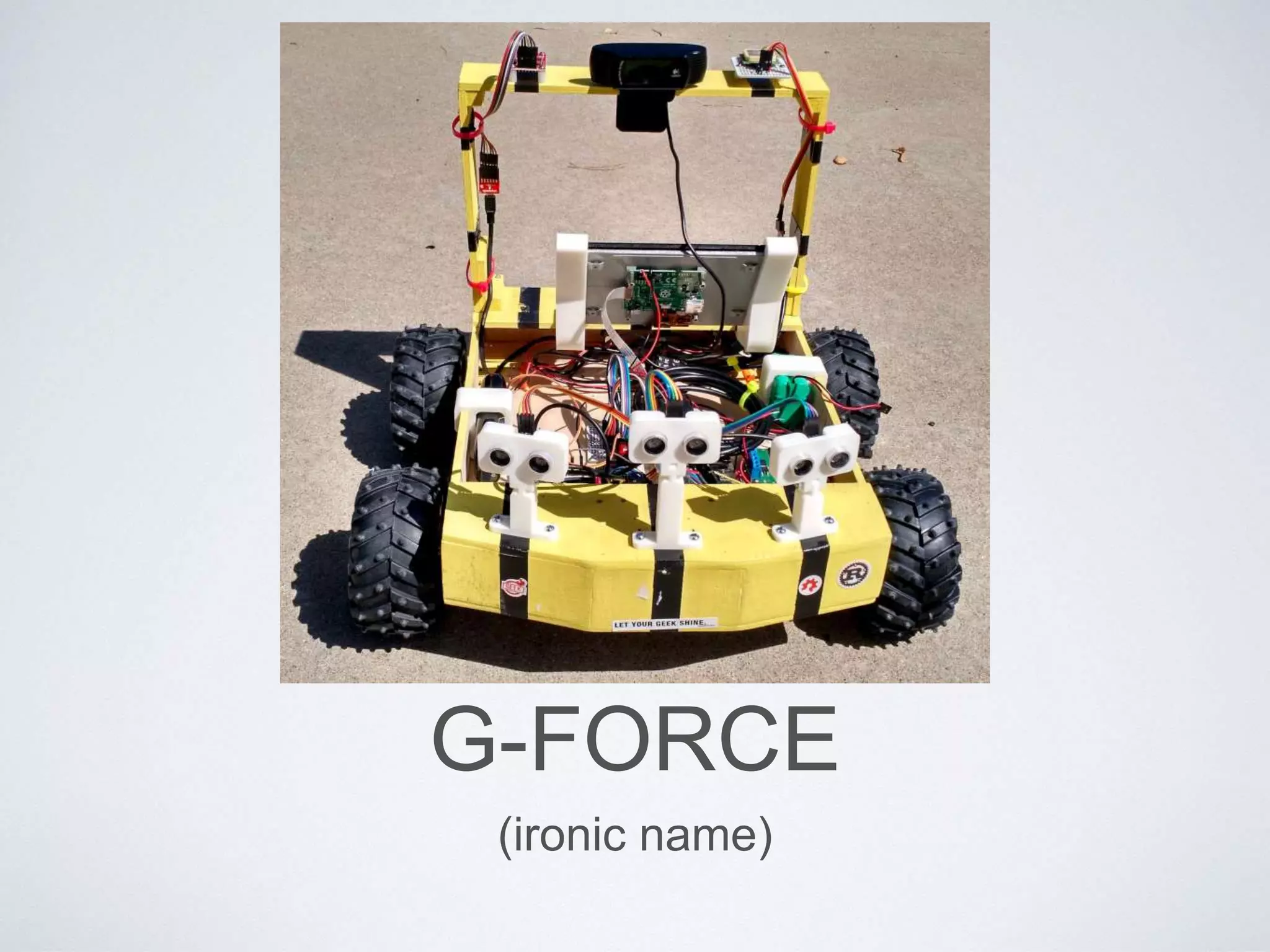
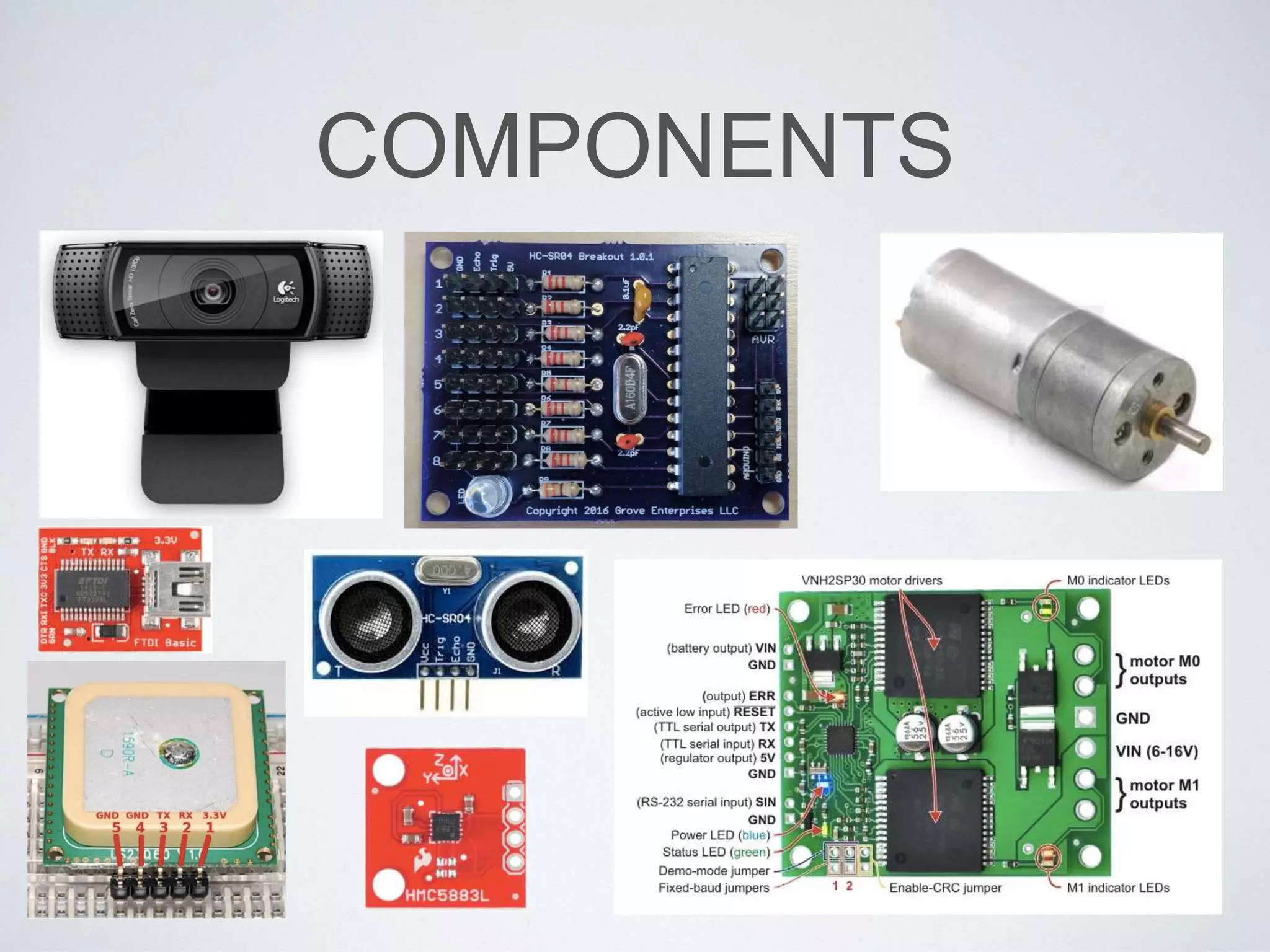
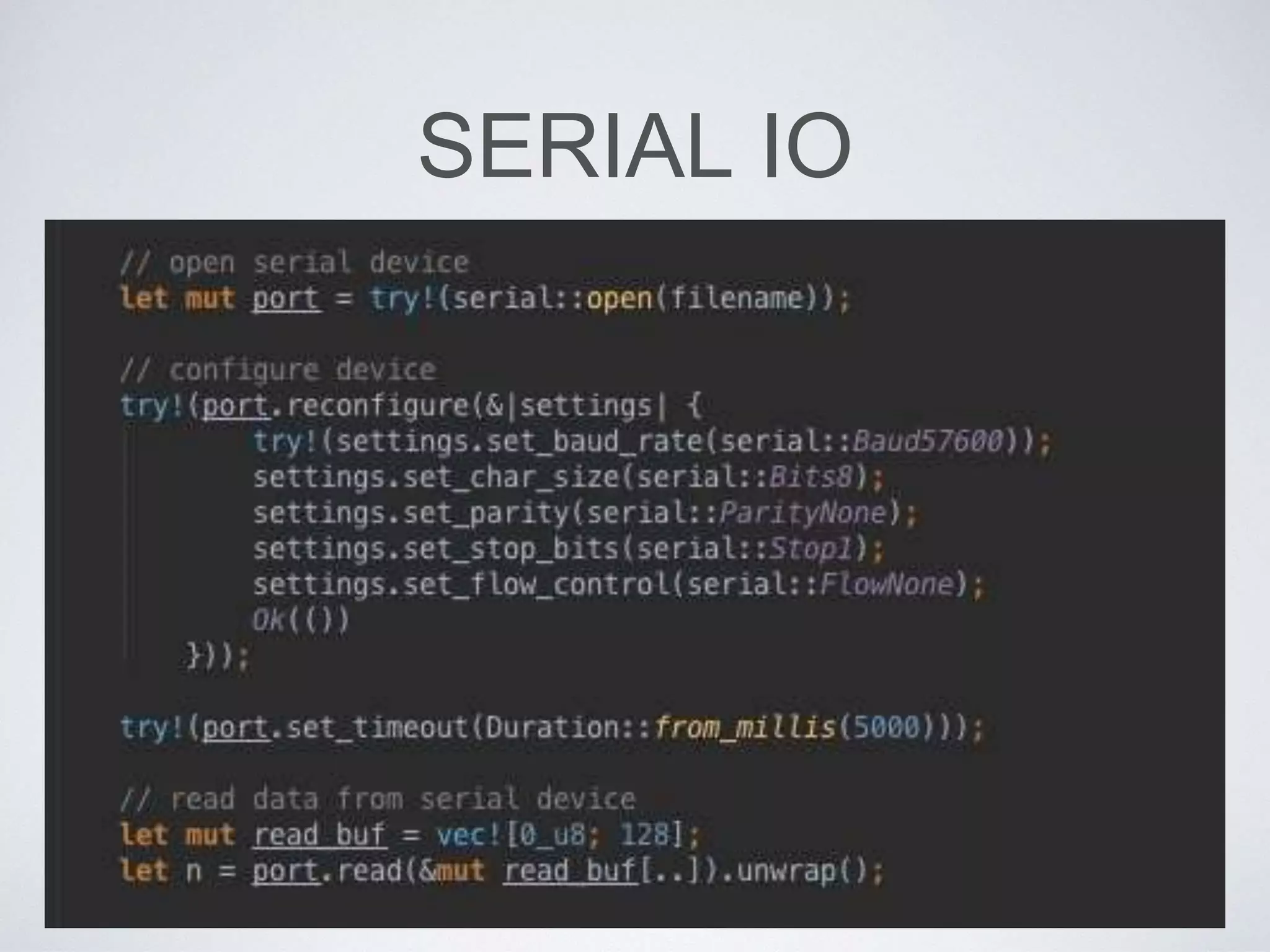
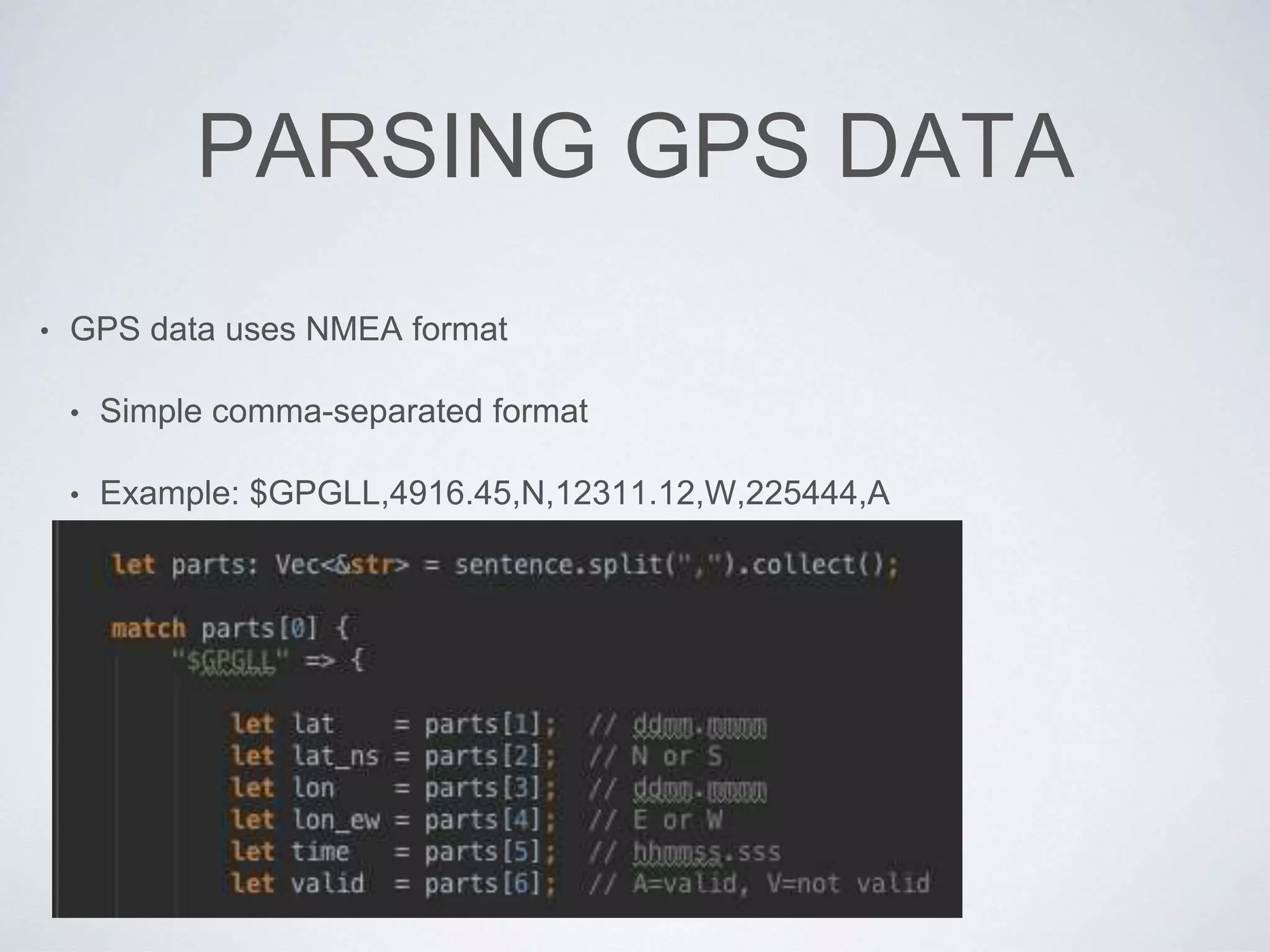
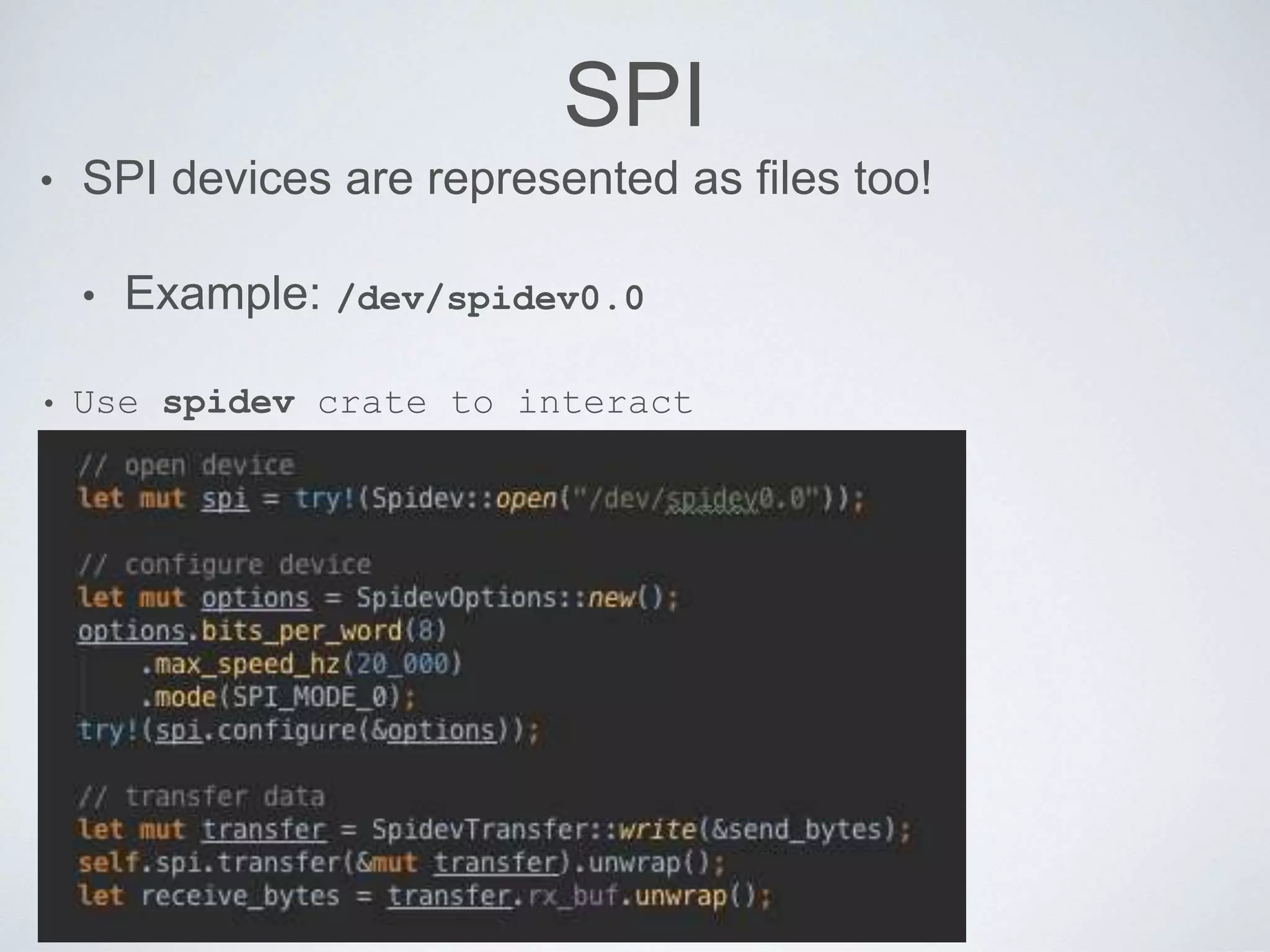
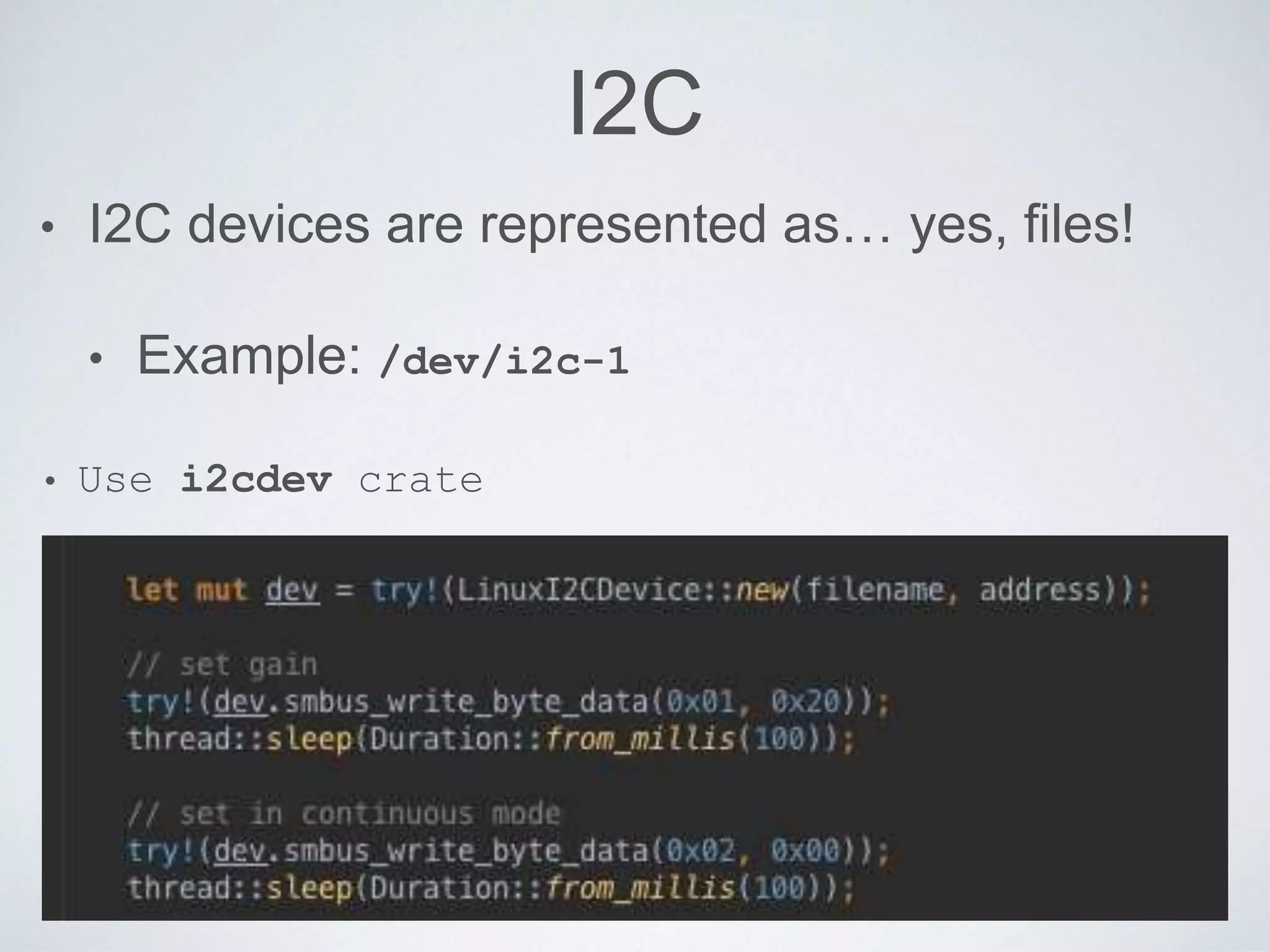
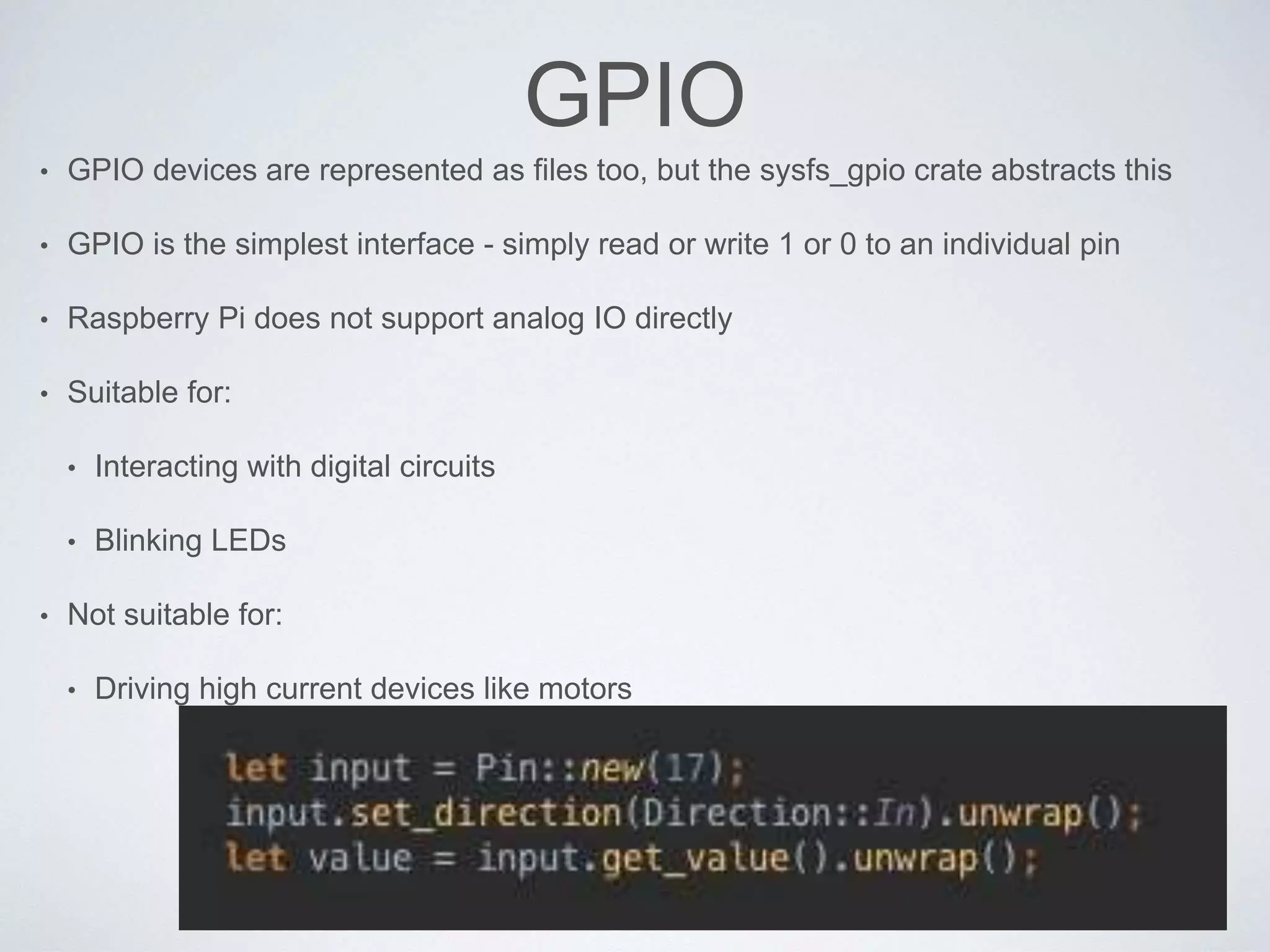
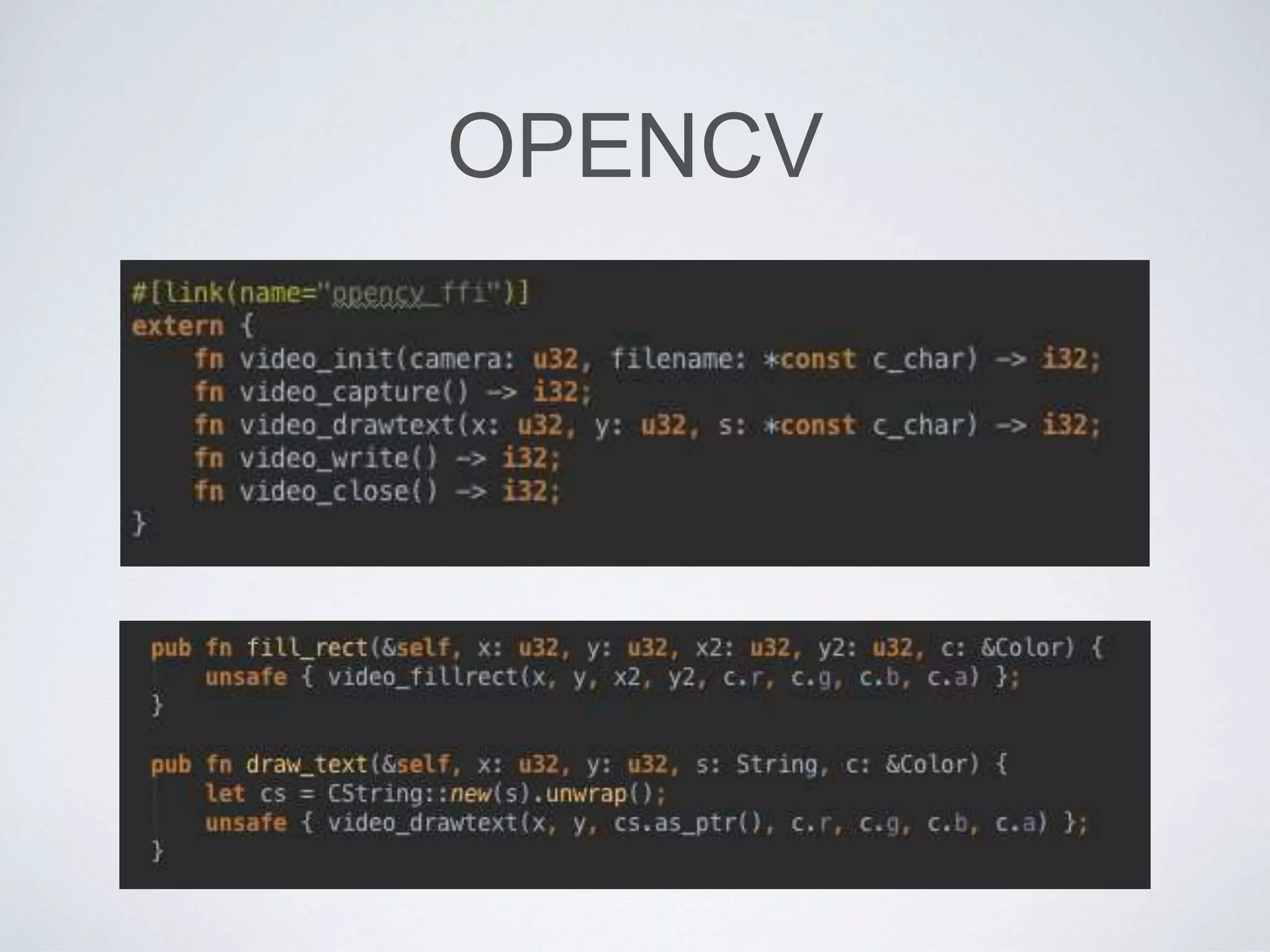
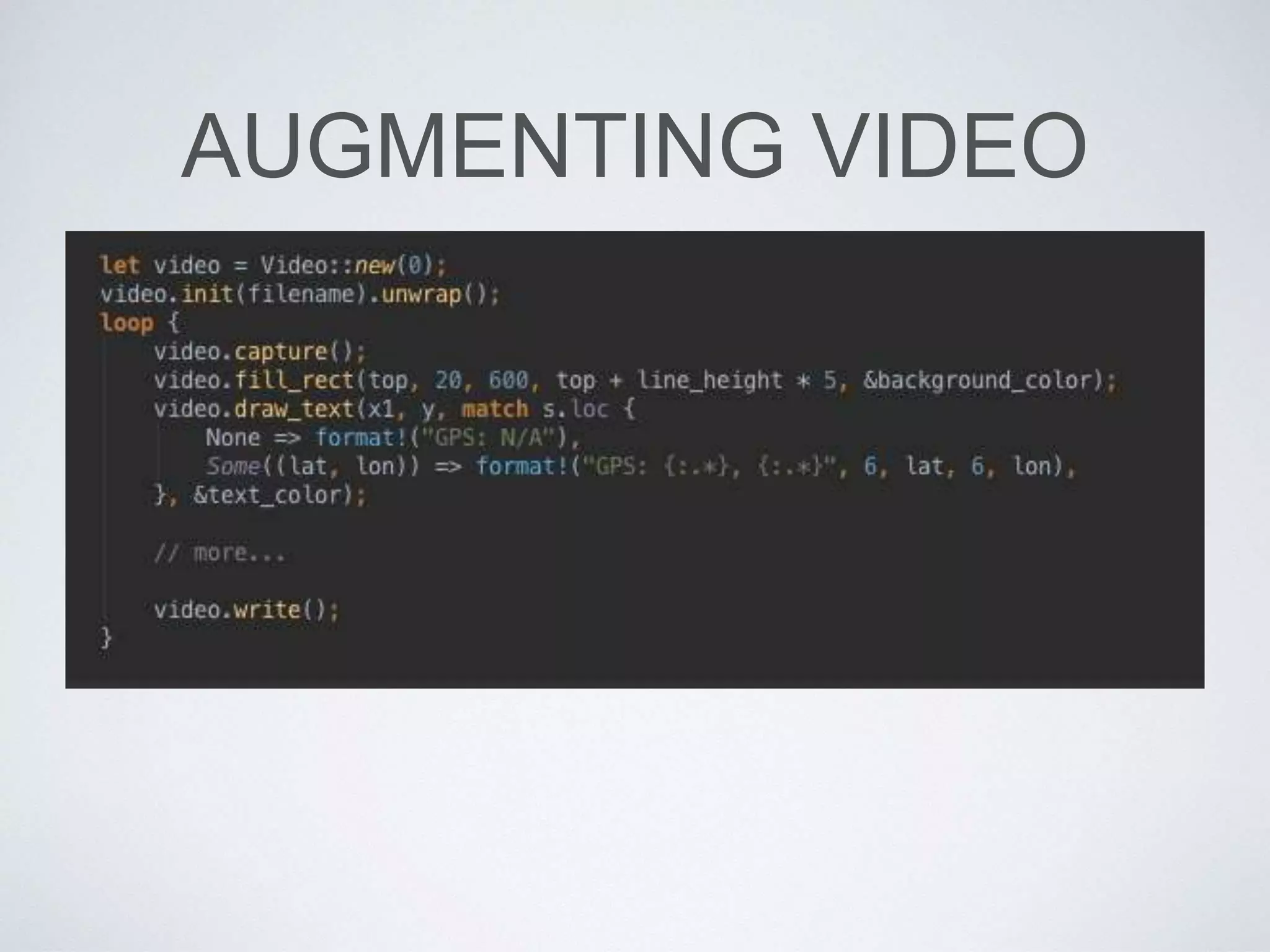
This document discusses a project to build an autonomous vehicle using Rust and a Raspberry Pi. The objectives were to navigate to GPS waypoints, avoid obstacles using ultrasonic sensors, and record video. Rust was chosen for its performance, safety, and existing crates for hardware interfaces. Challenges included slow compilation on the Pi and lack of sensor libraries in Rust. The vehicle struggled detecting obstacles at angles and had compass calibration issues. Overall it was a learning experience to use Rust on embedded systems.

















































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)

















