Download as PDF, PPTX



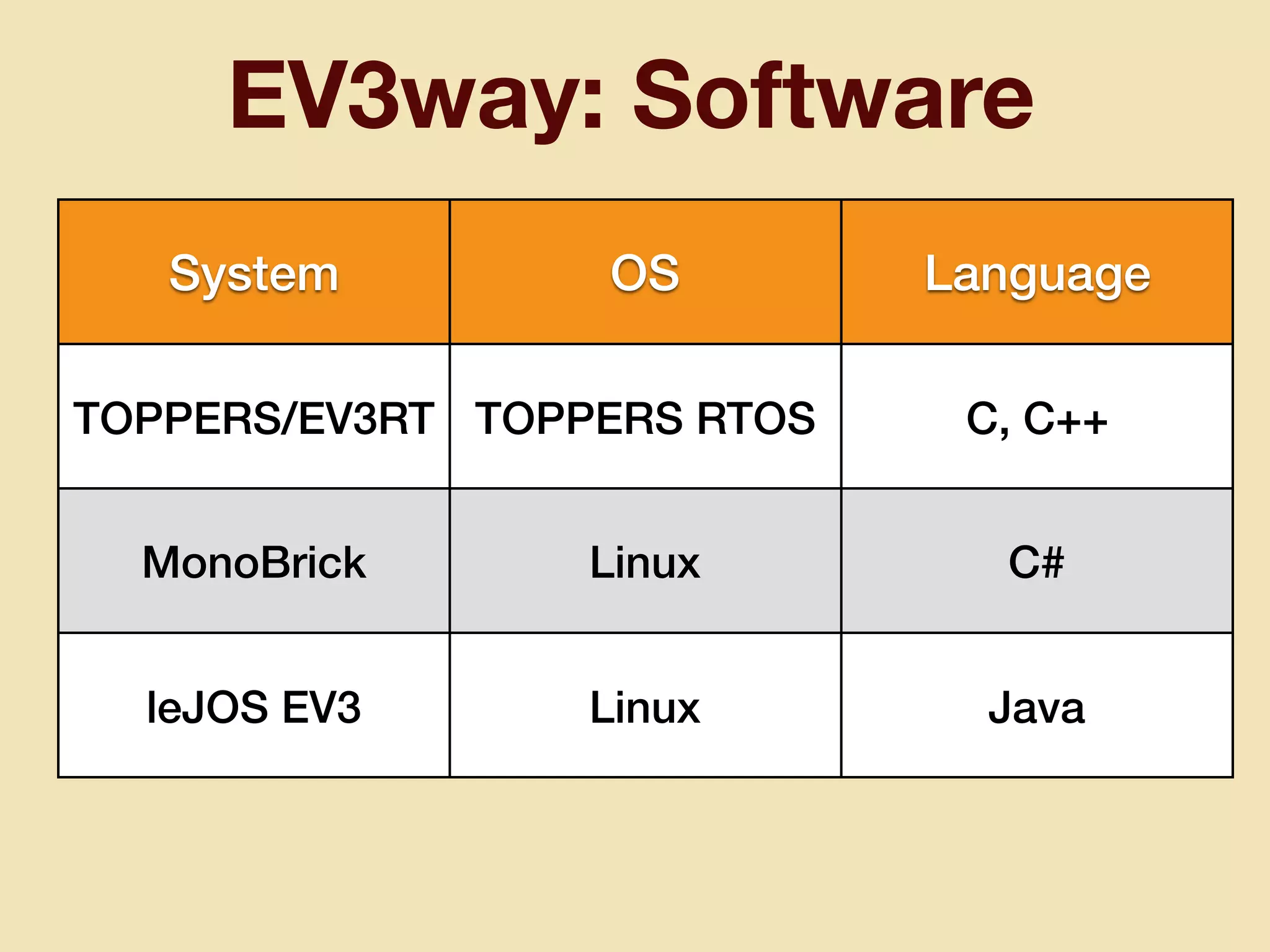
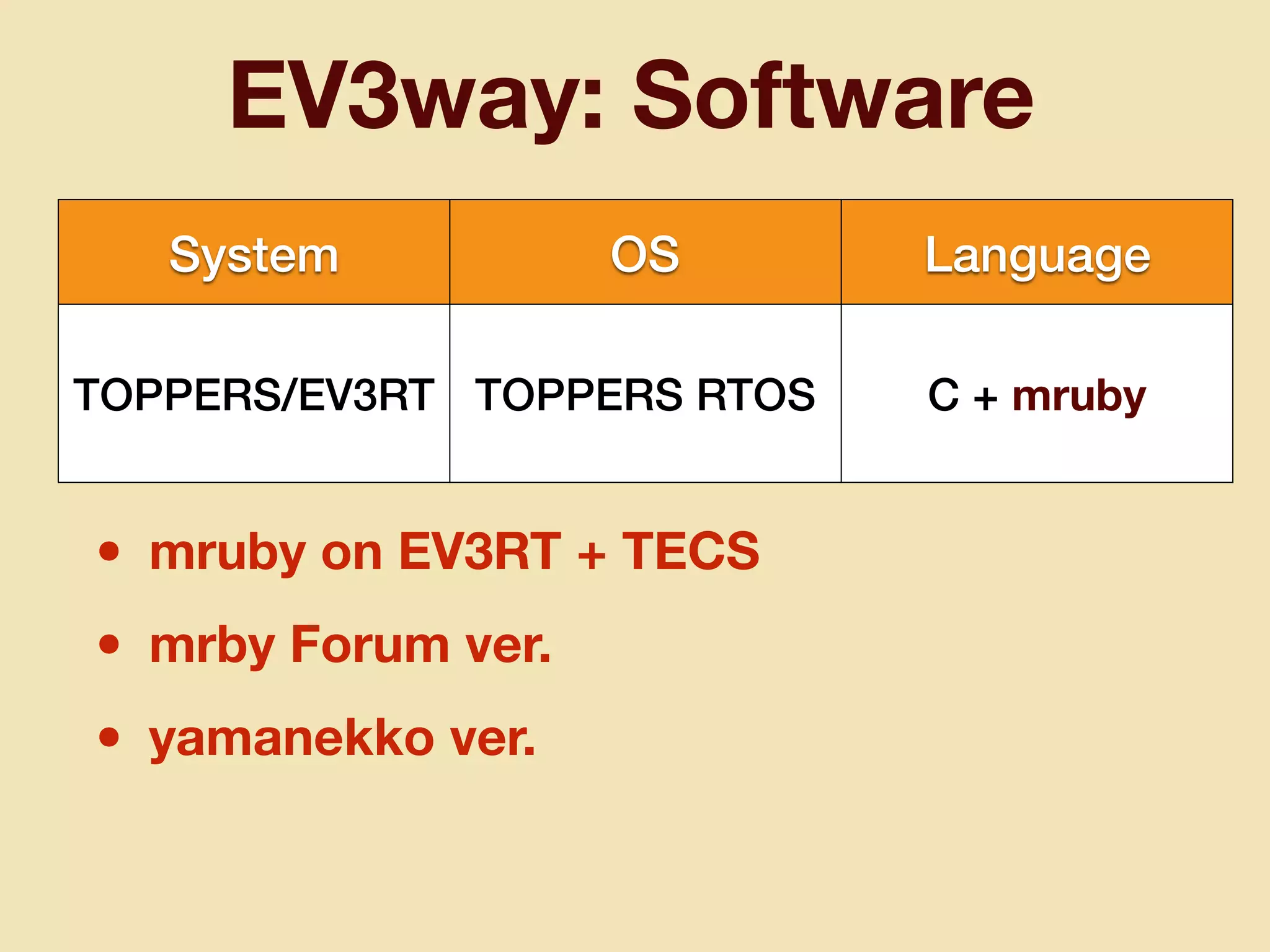
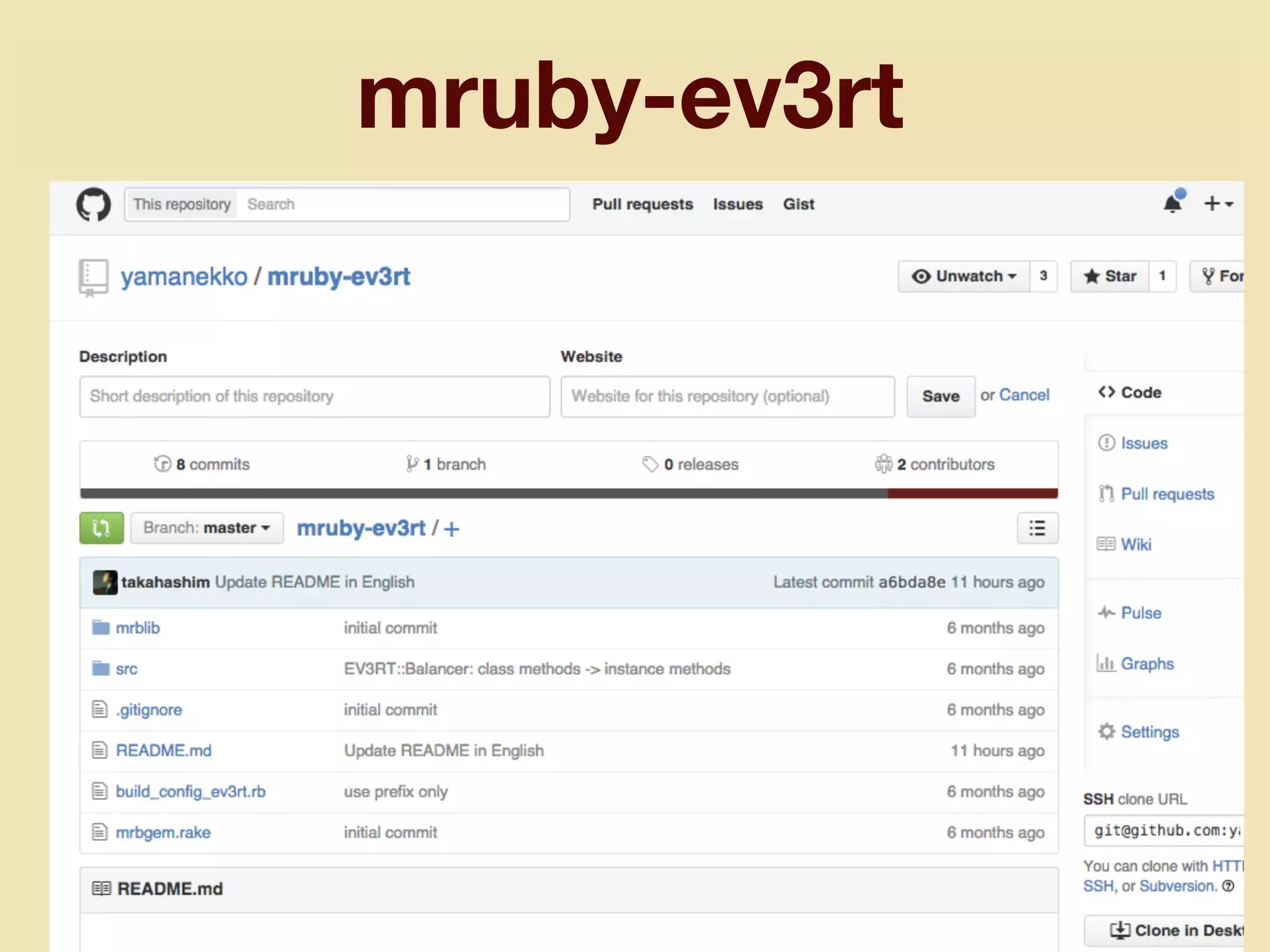
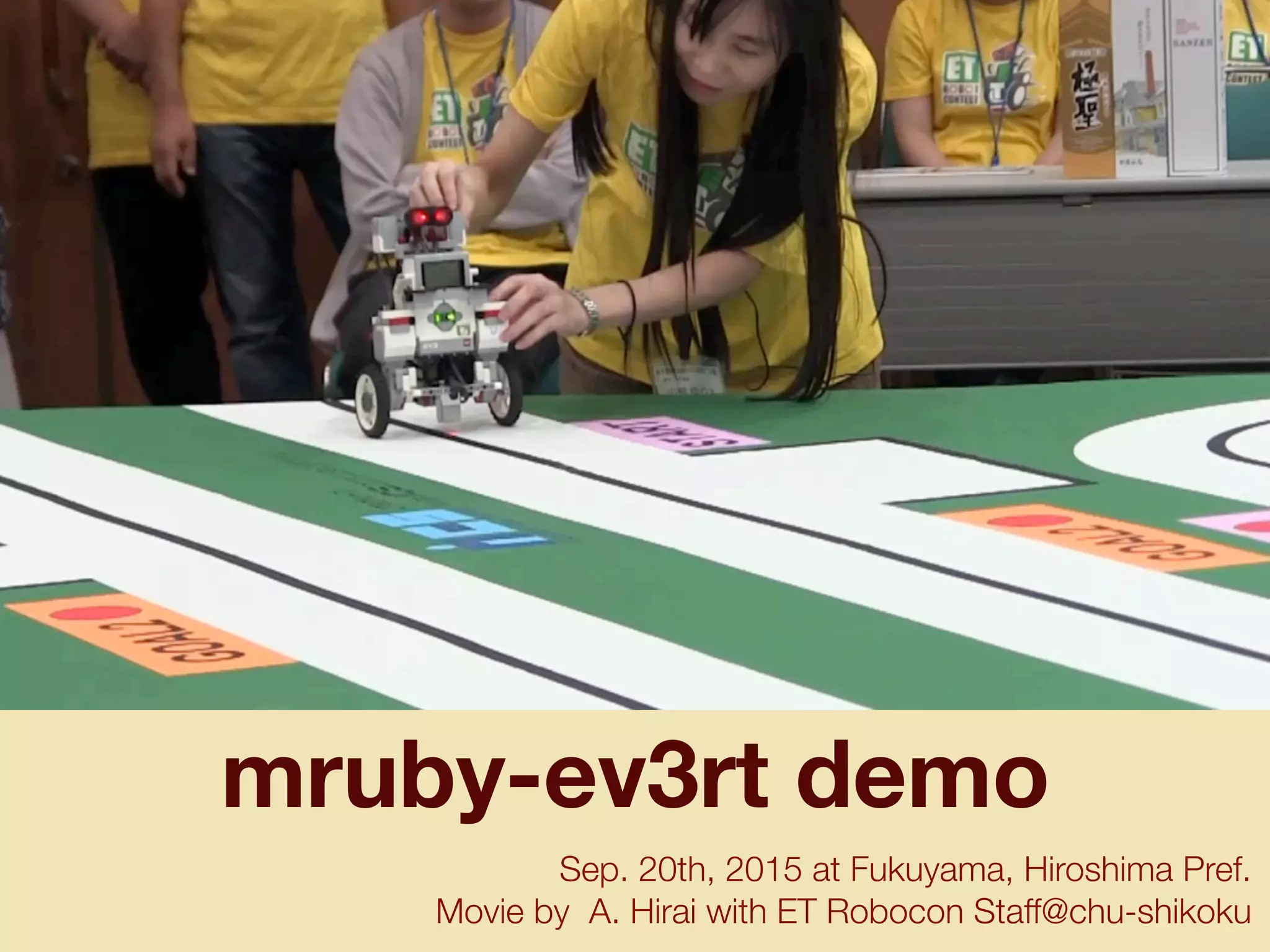
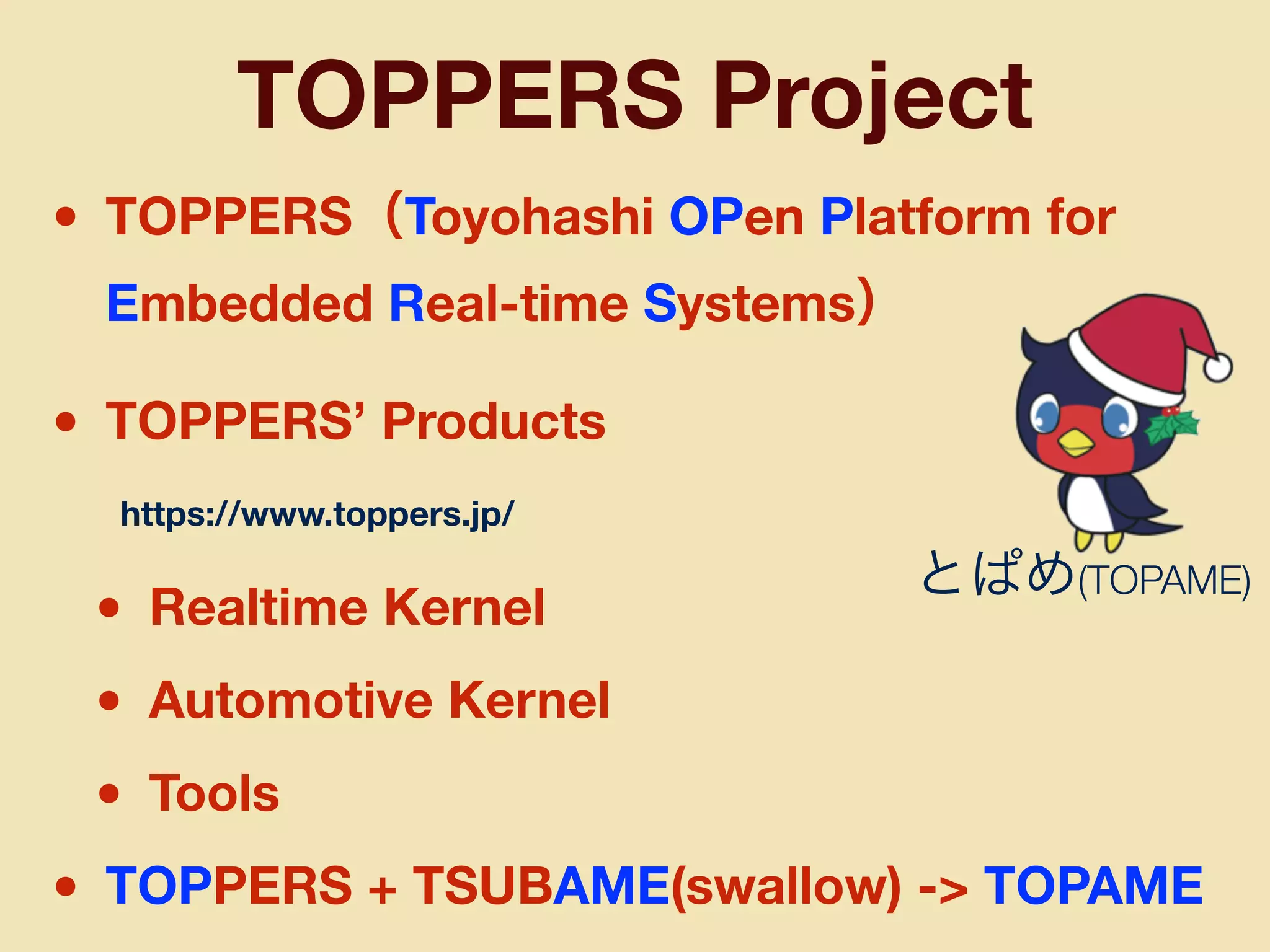
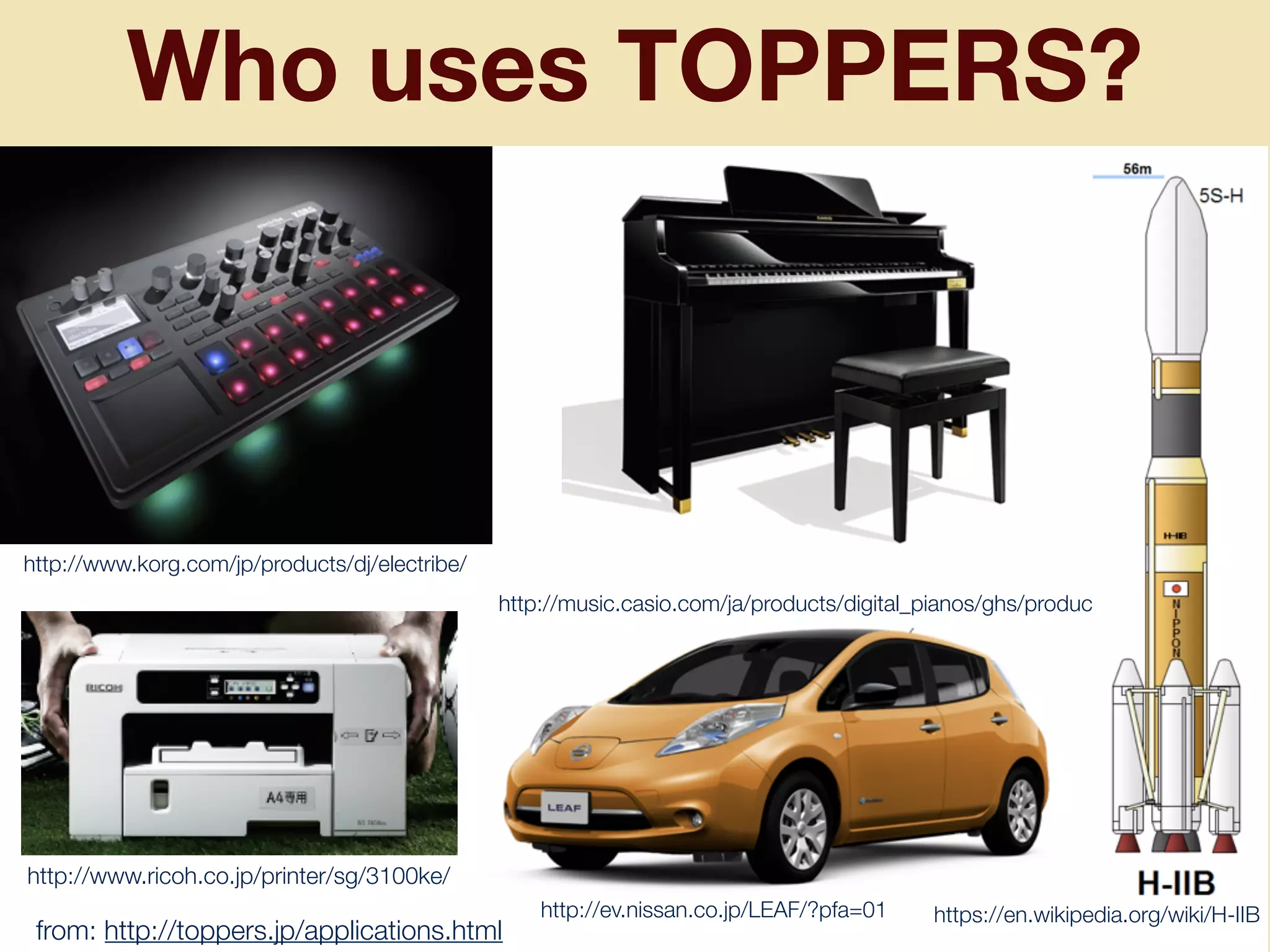

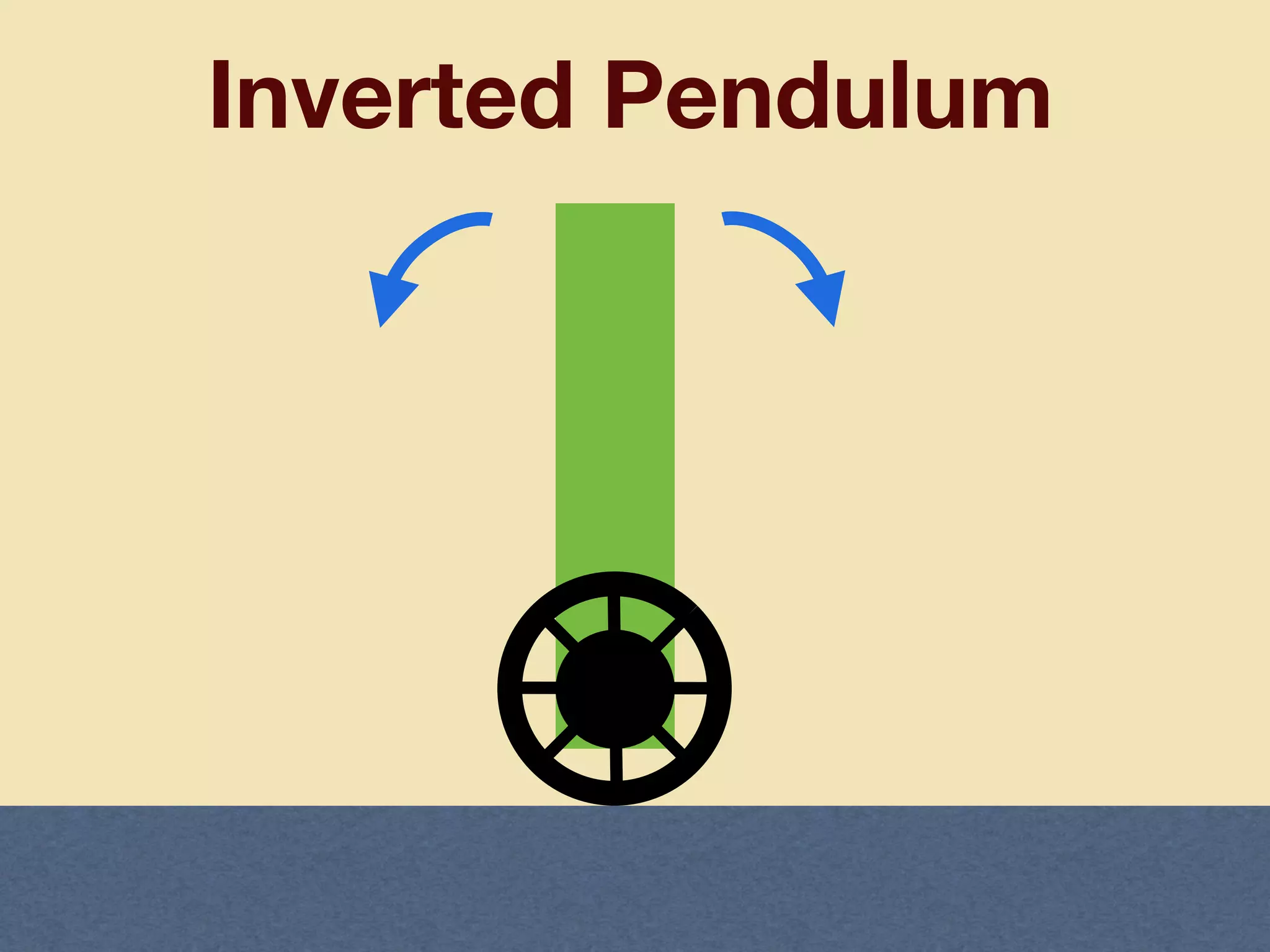
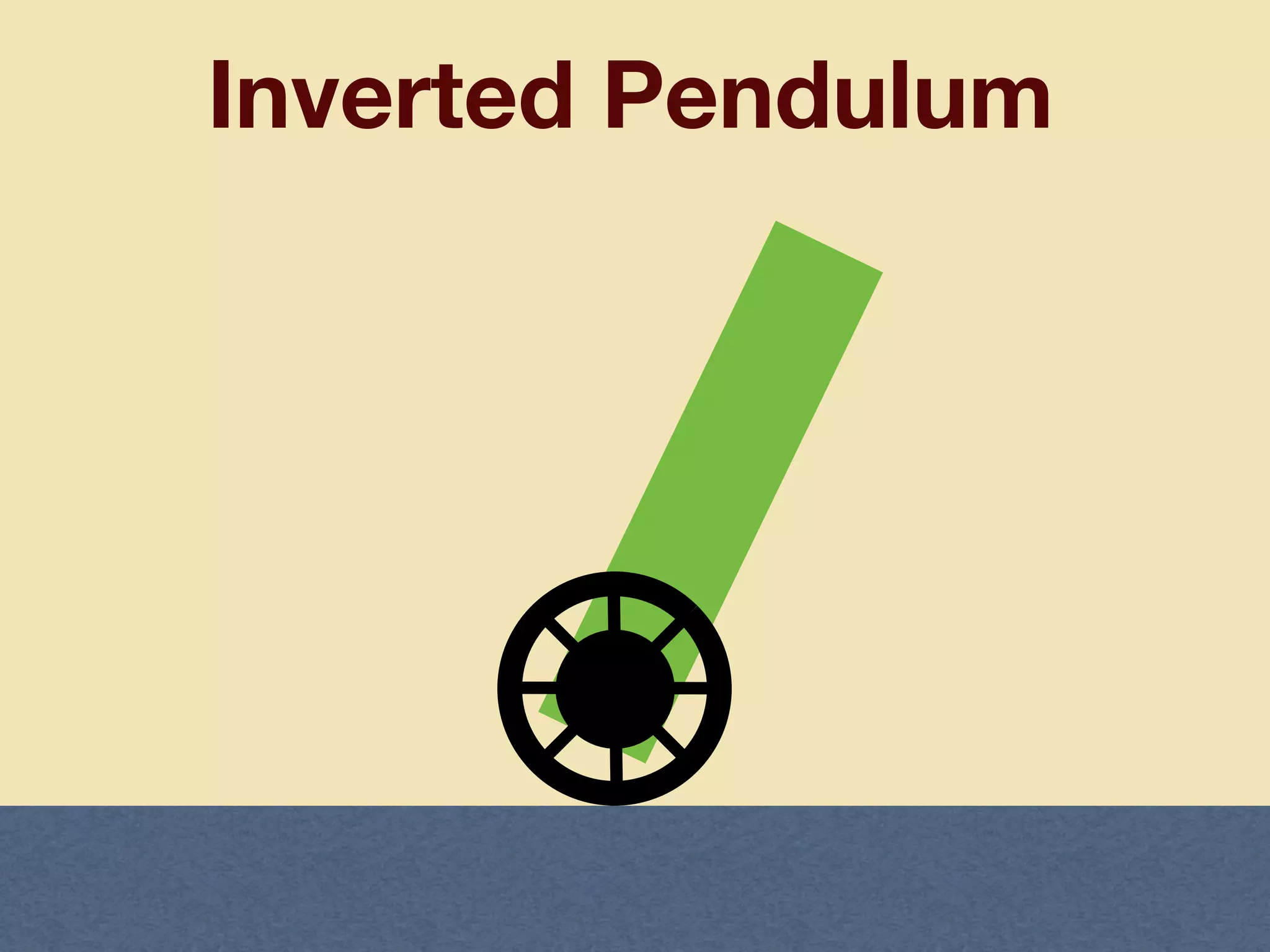
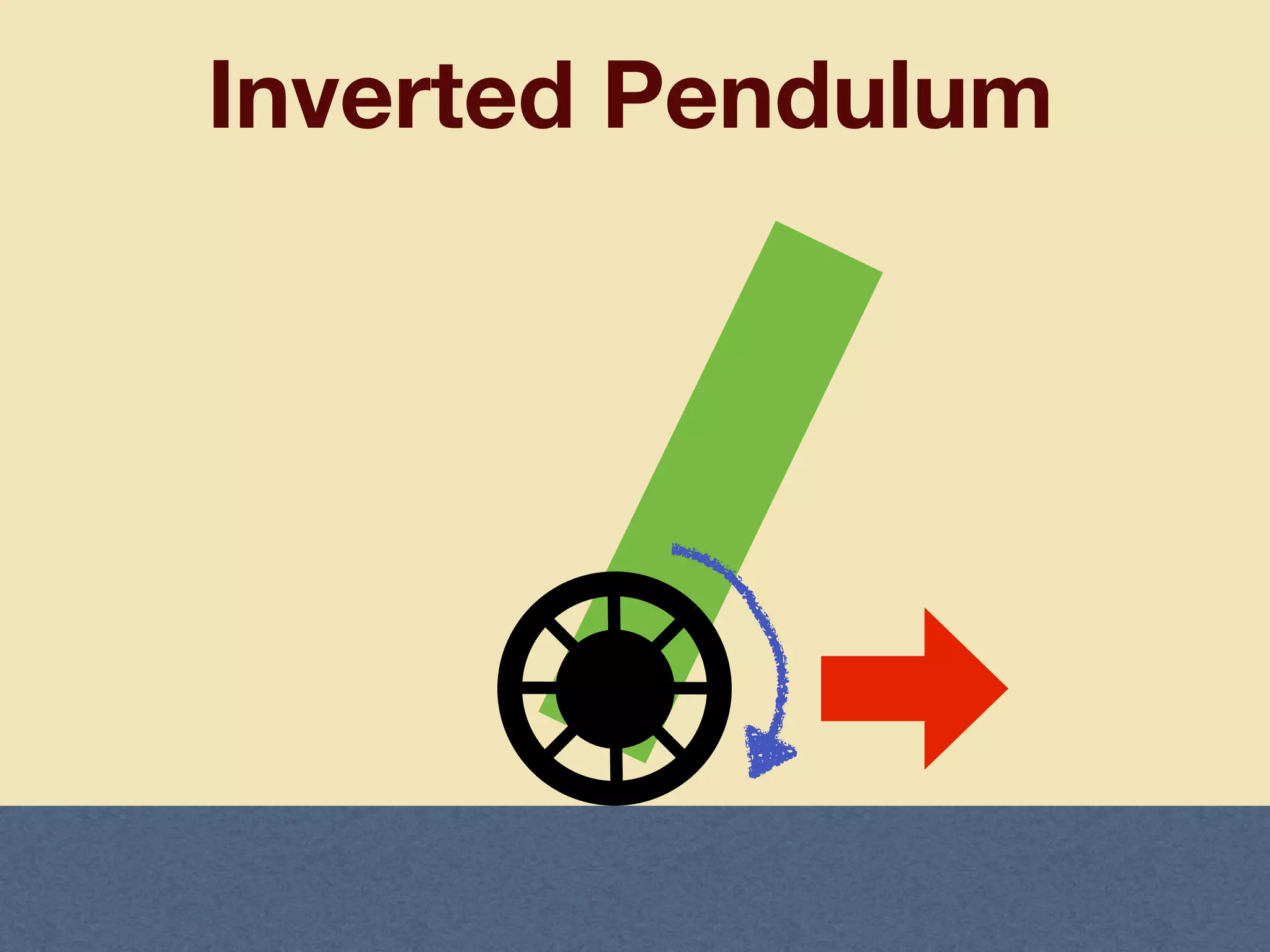
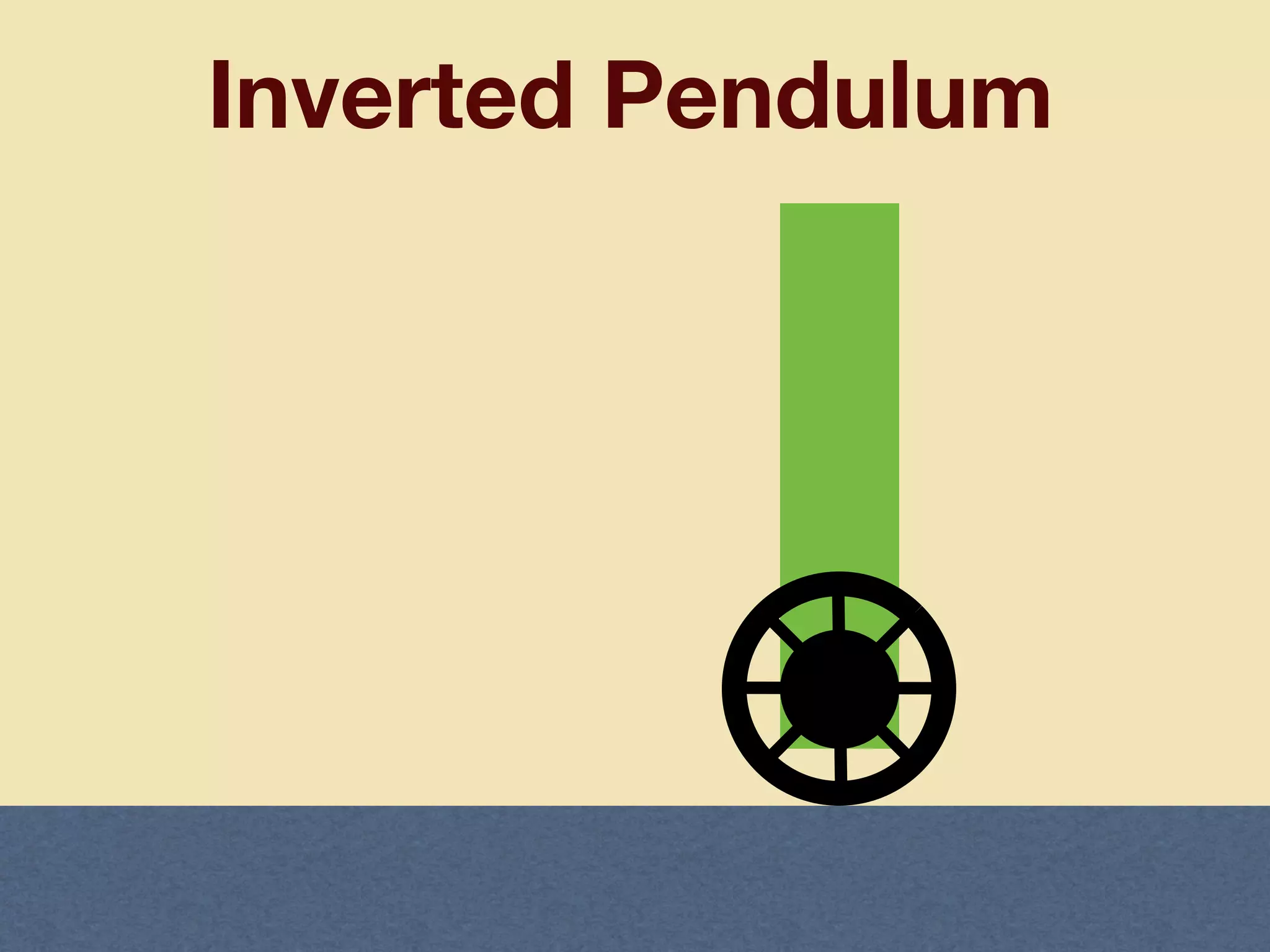
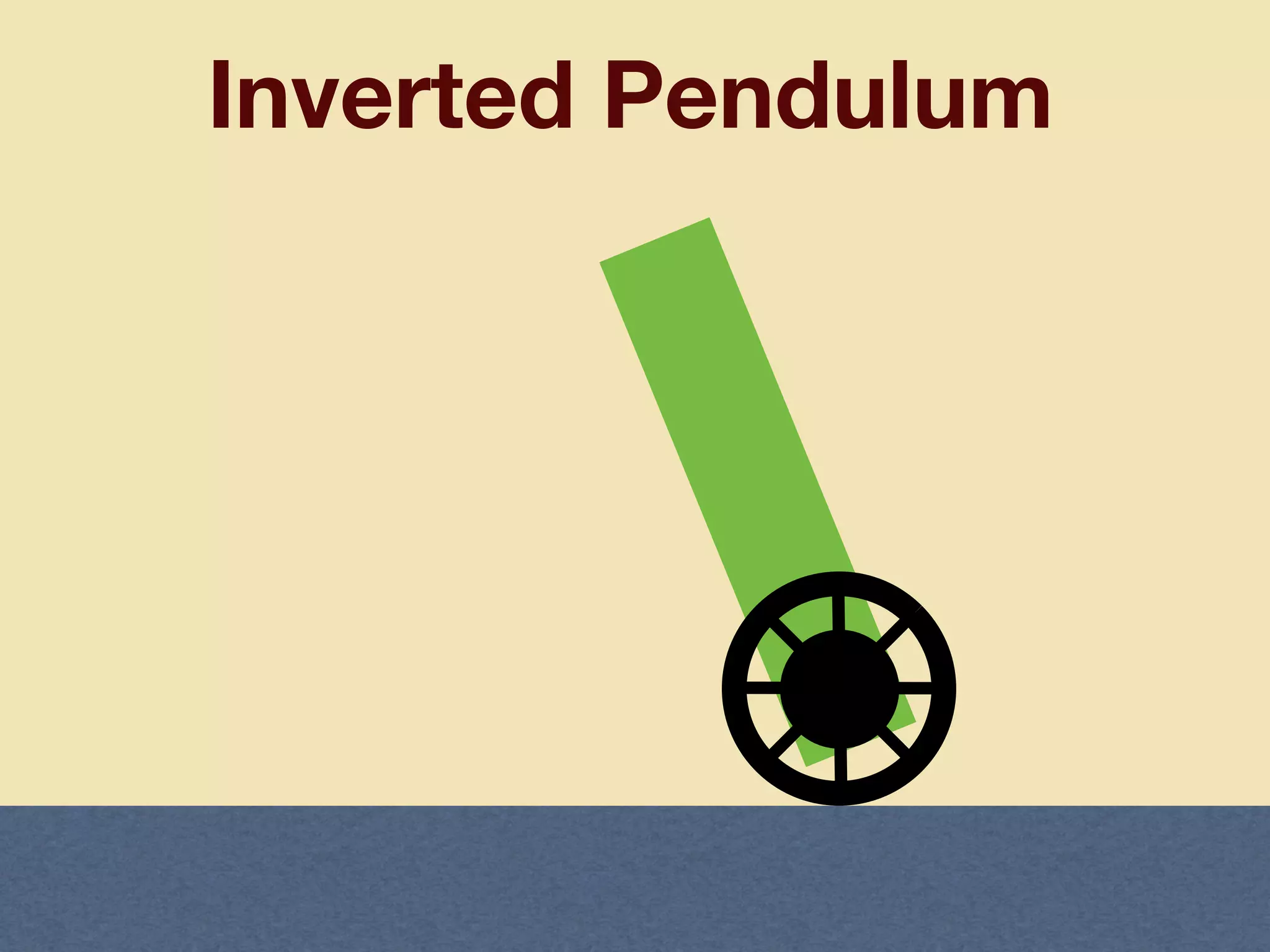
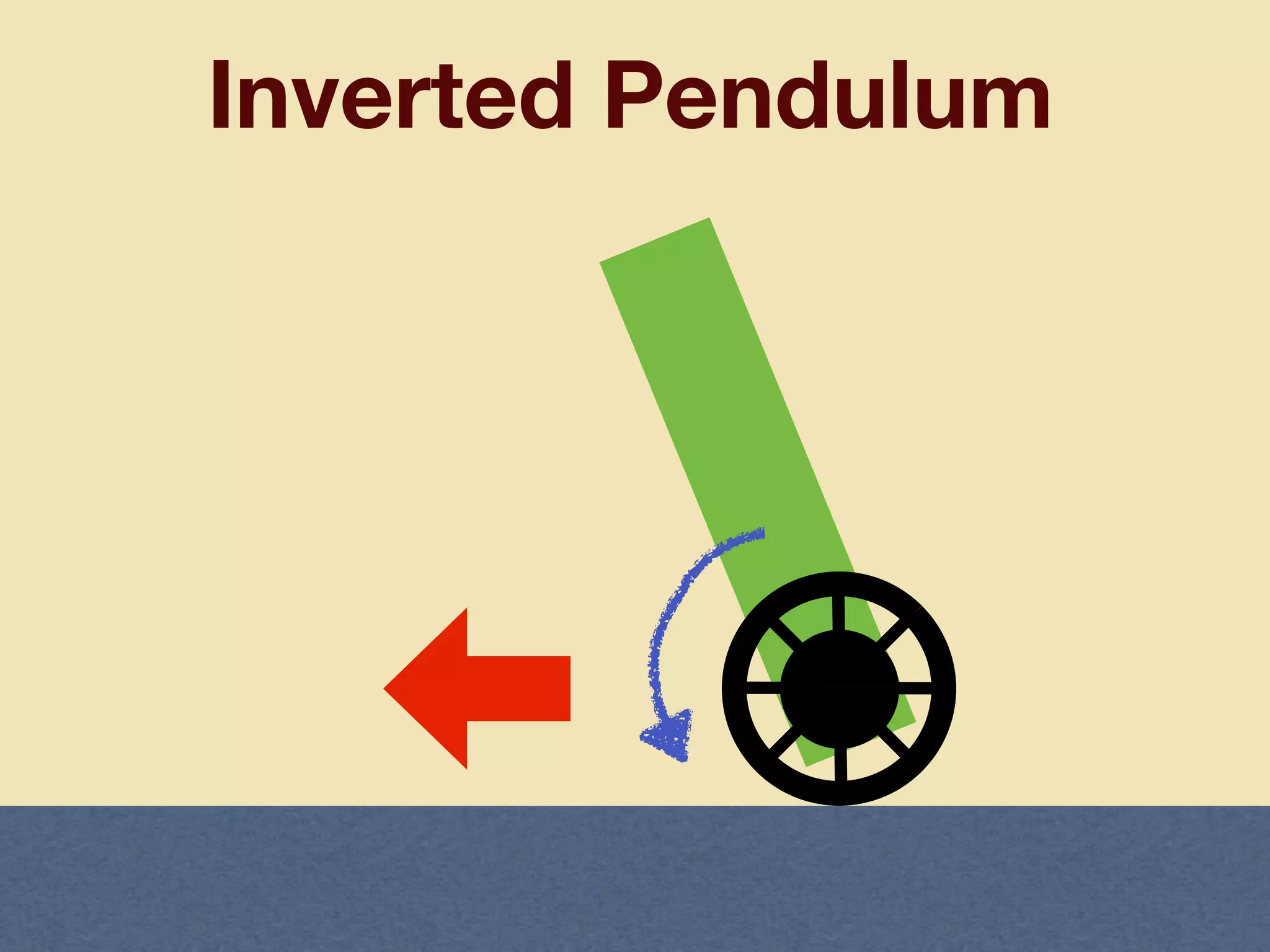
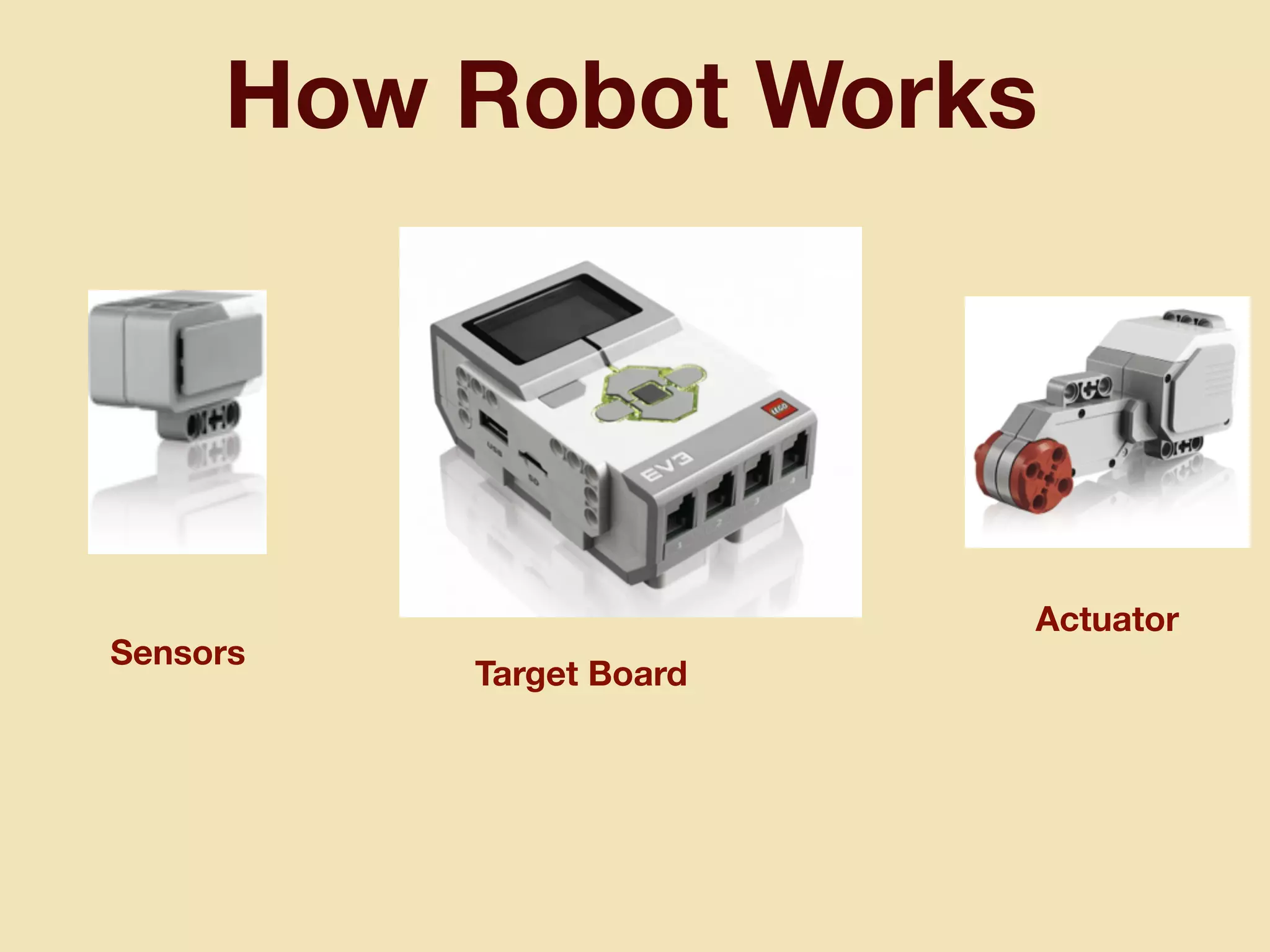
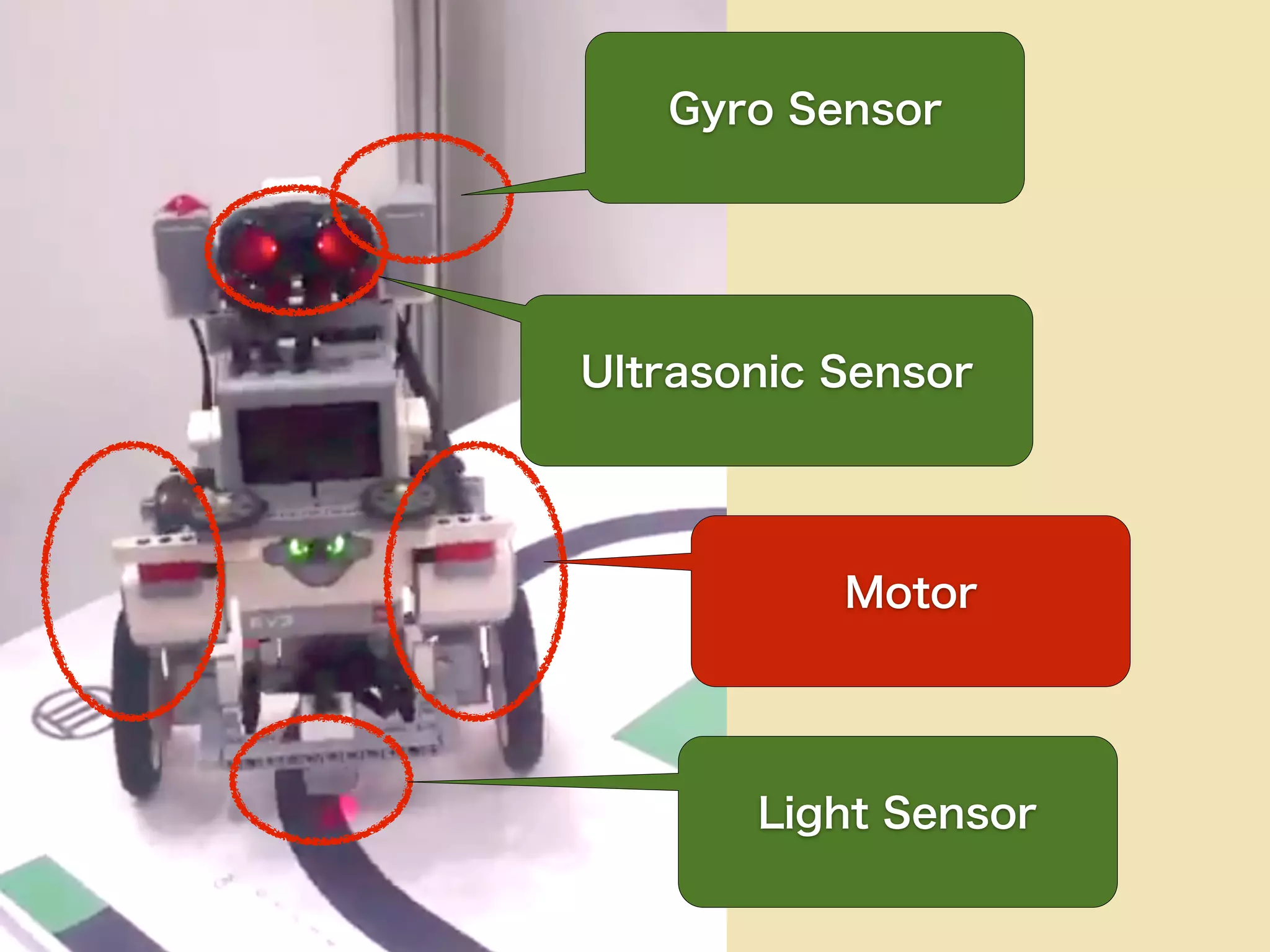
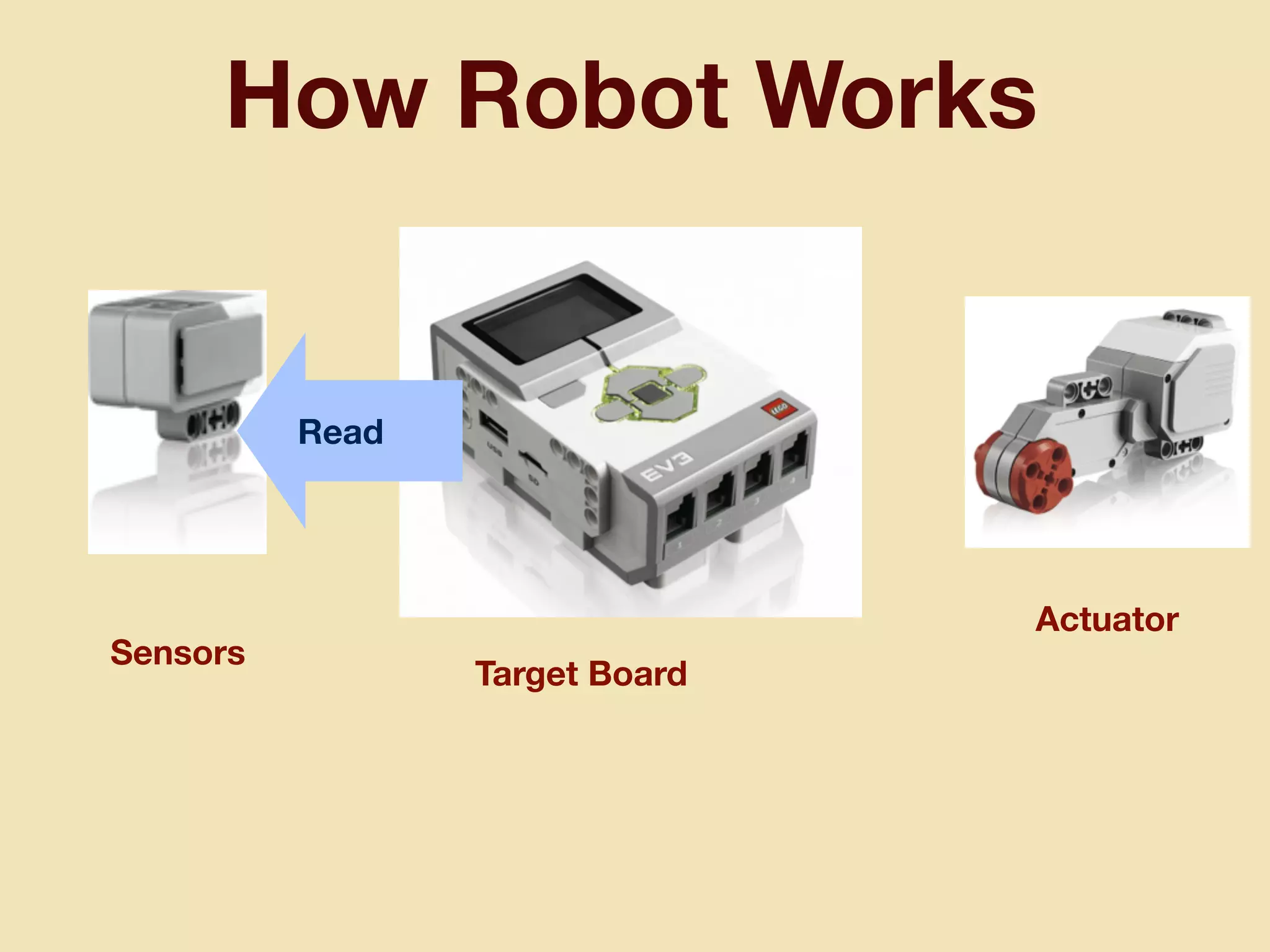
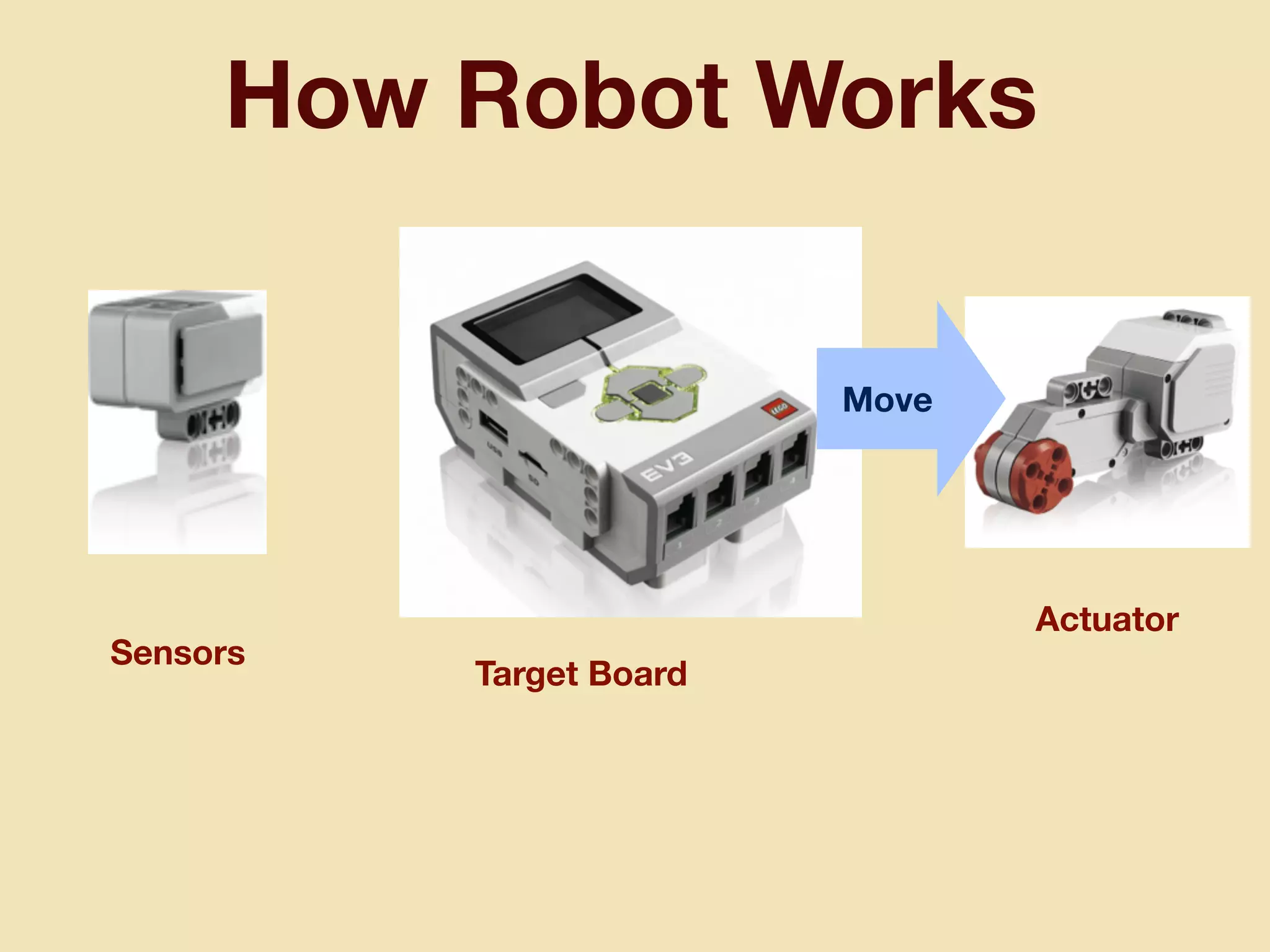
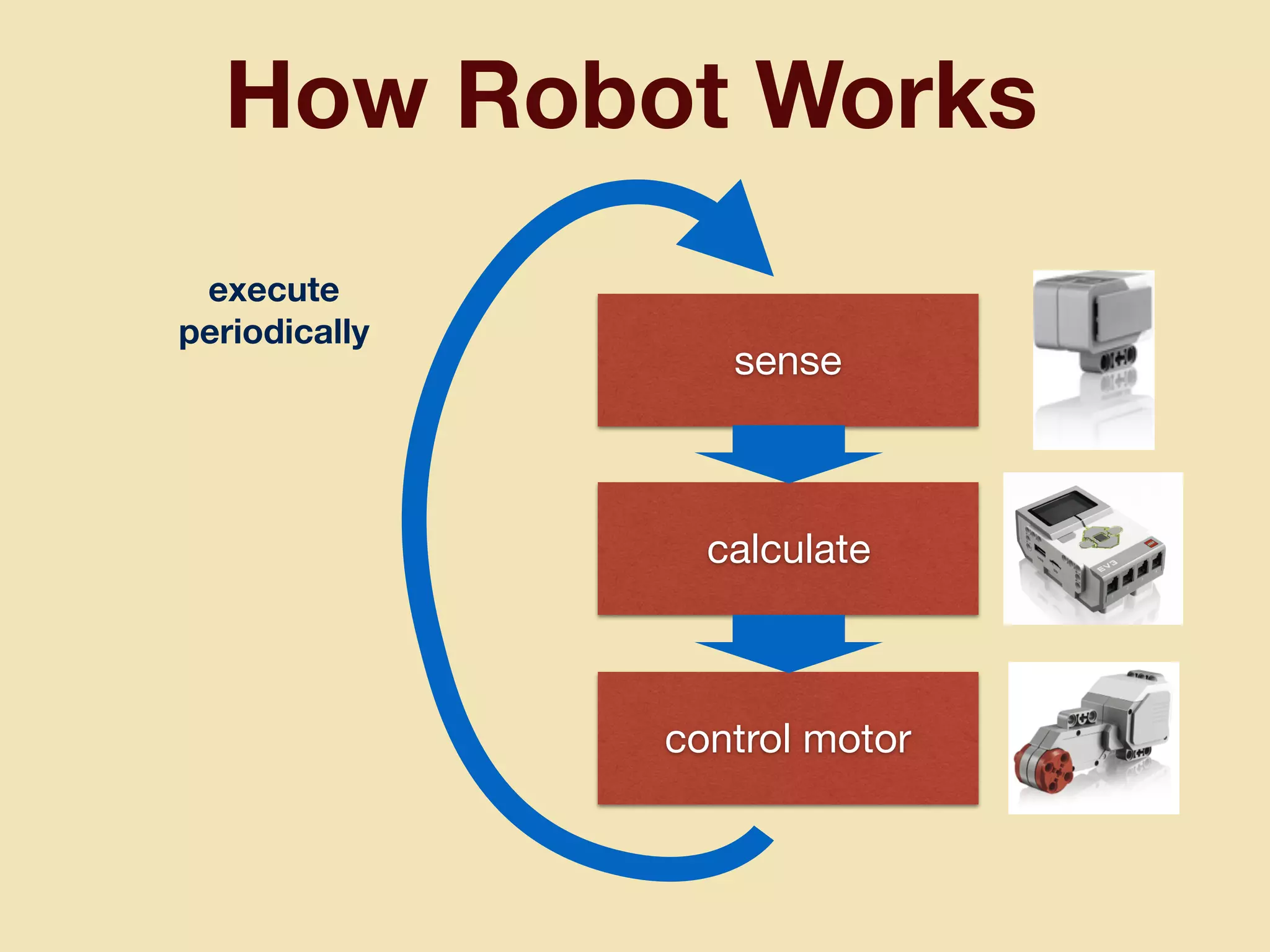
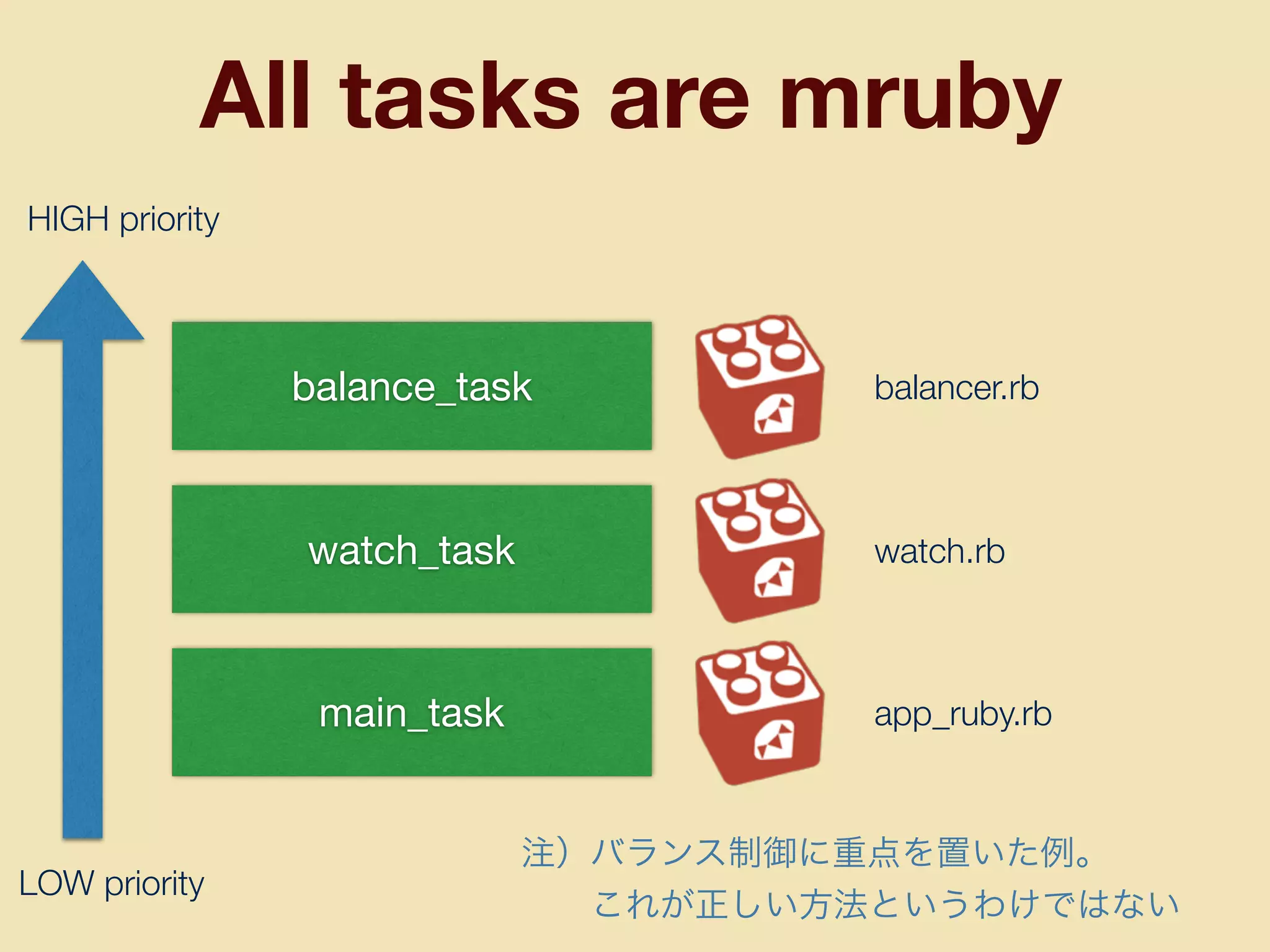
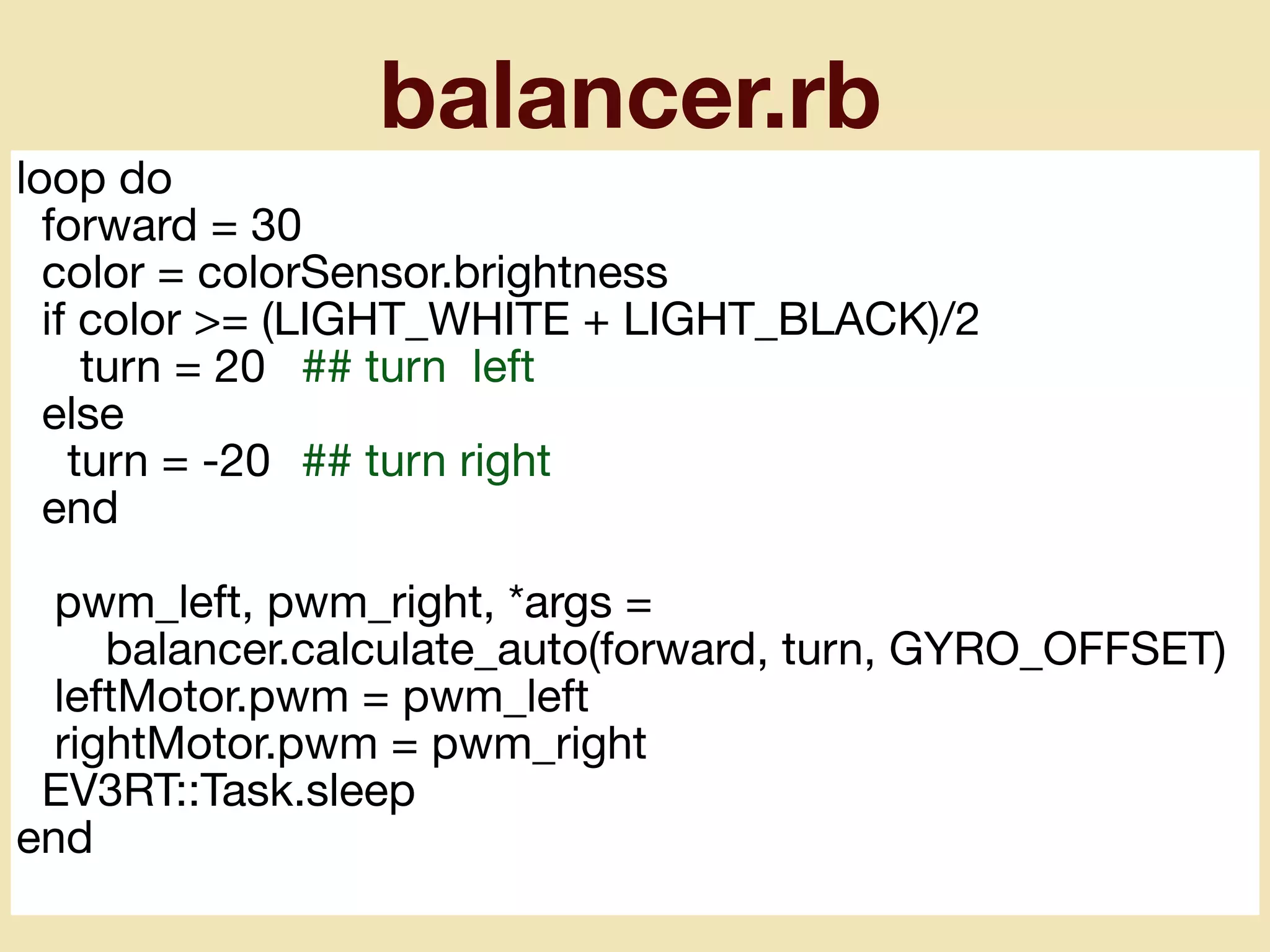
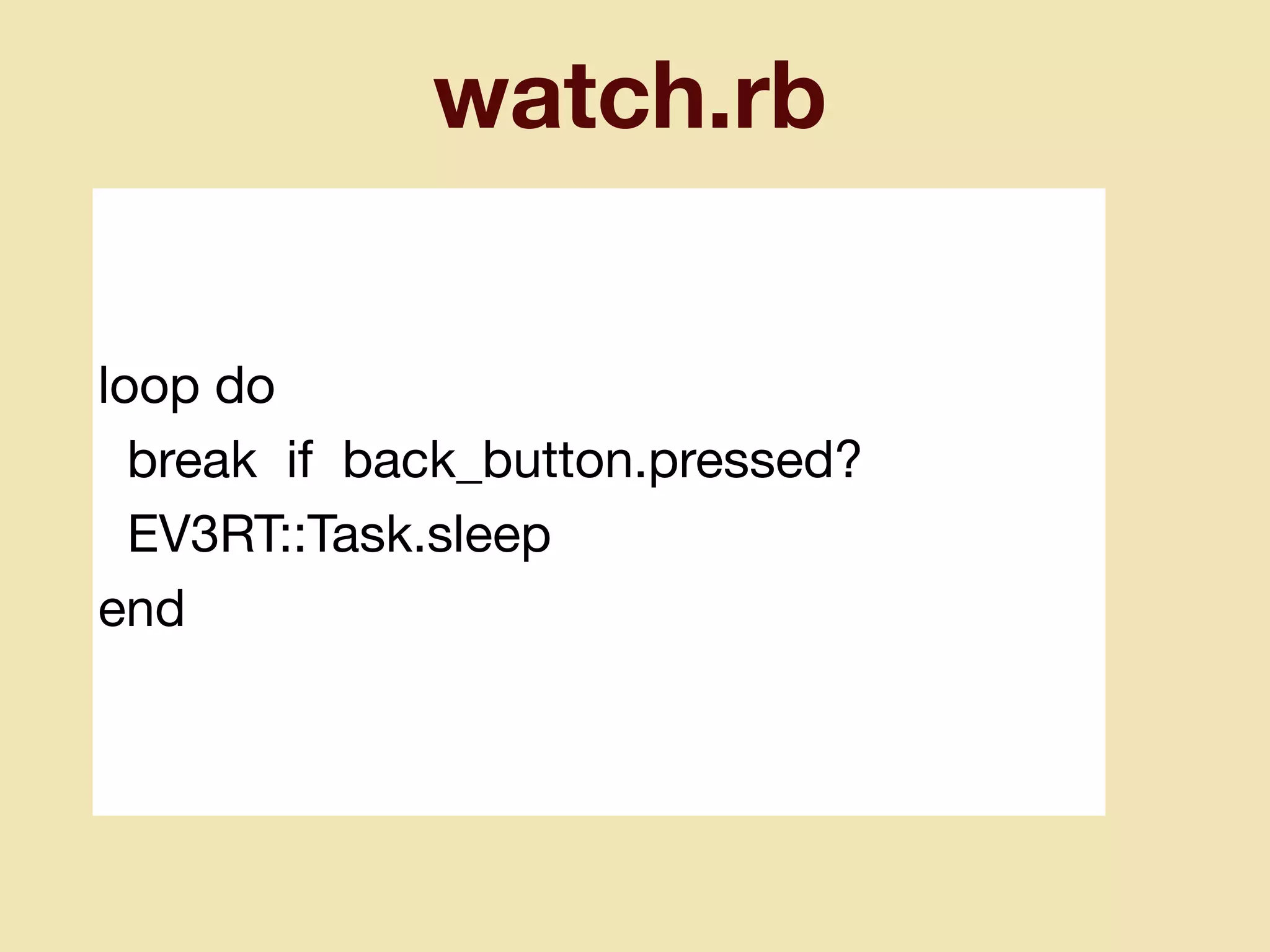
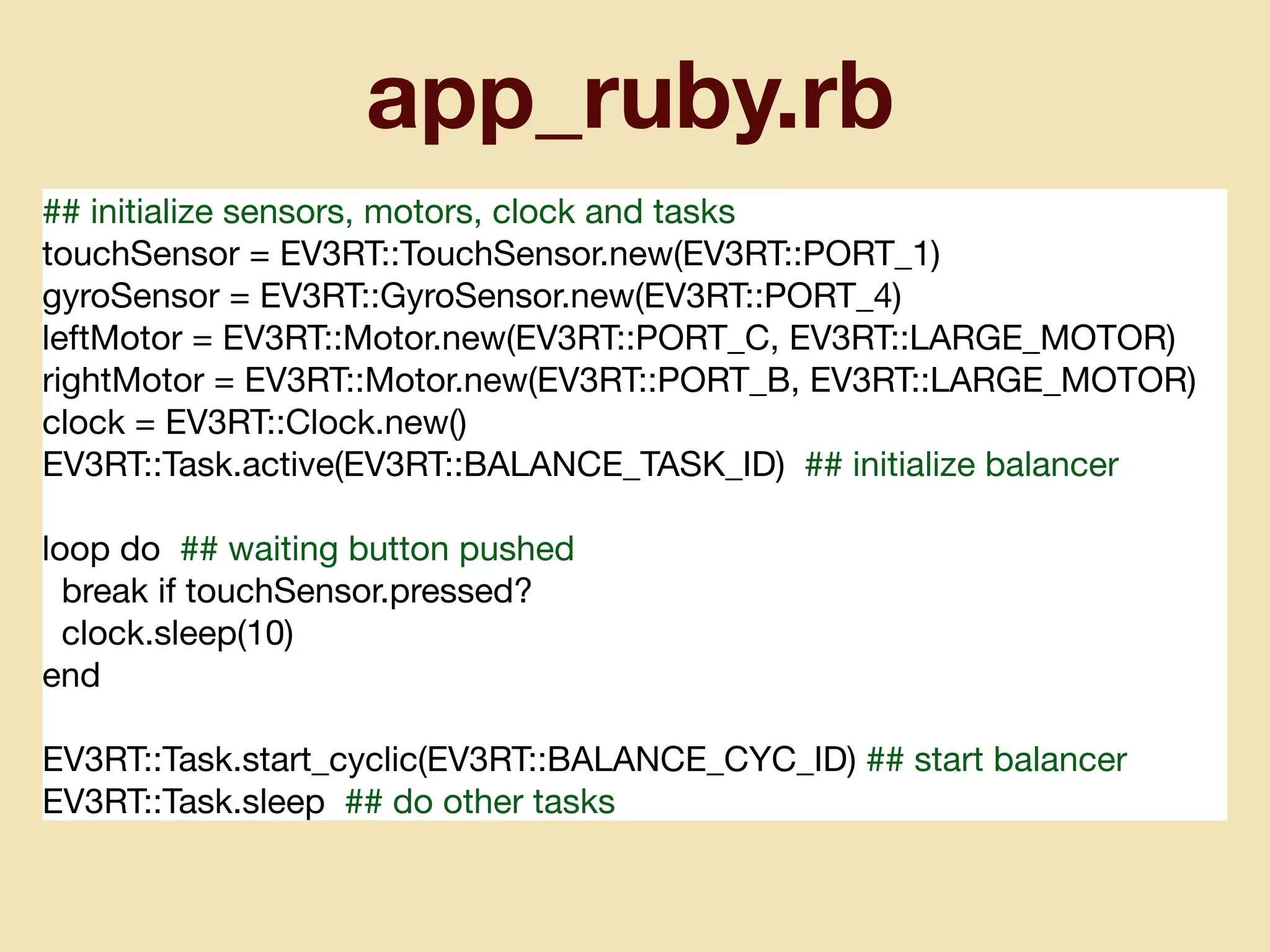
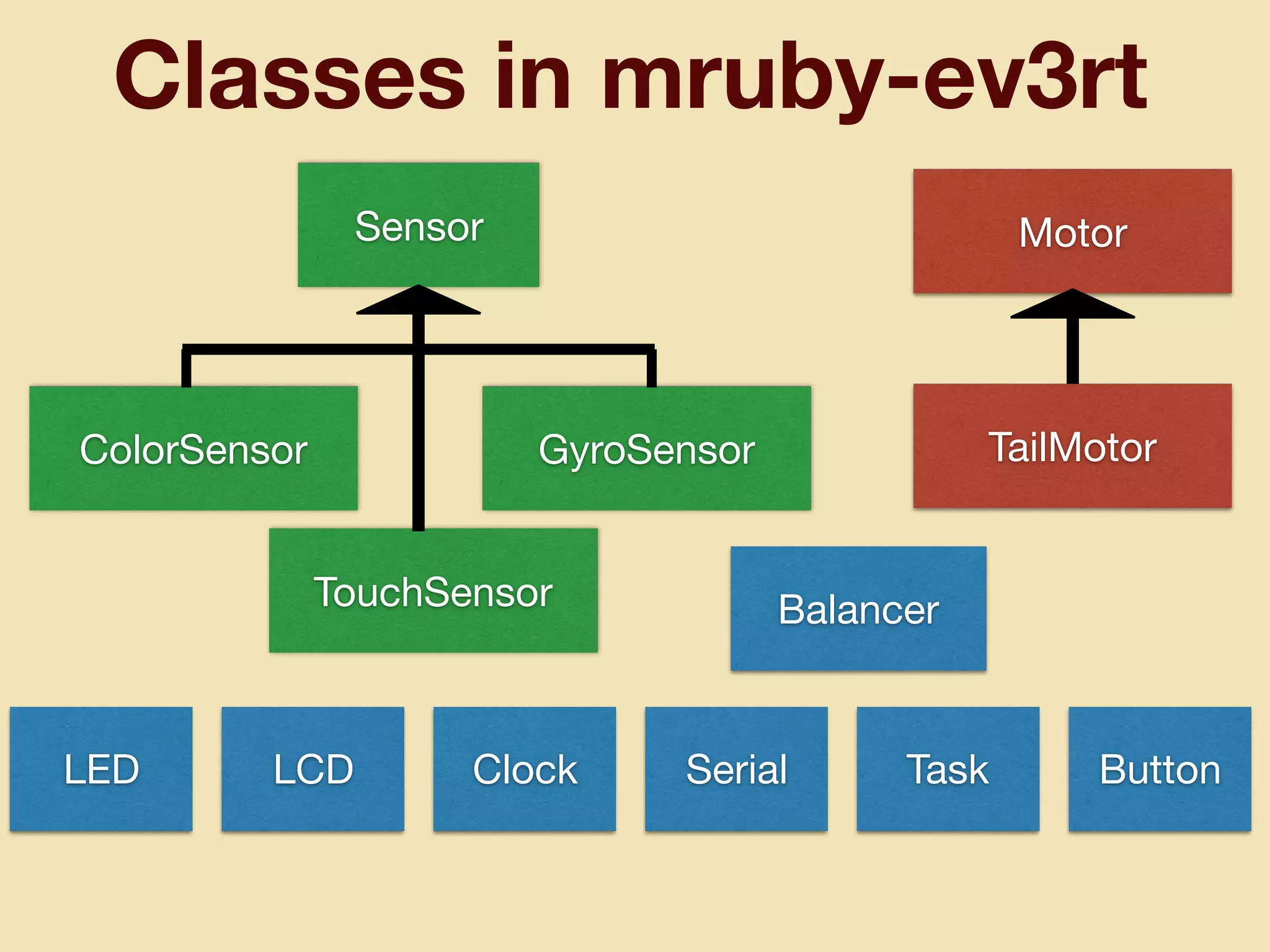
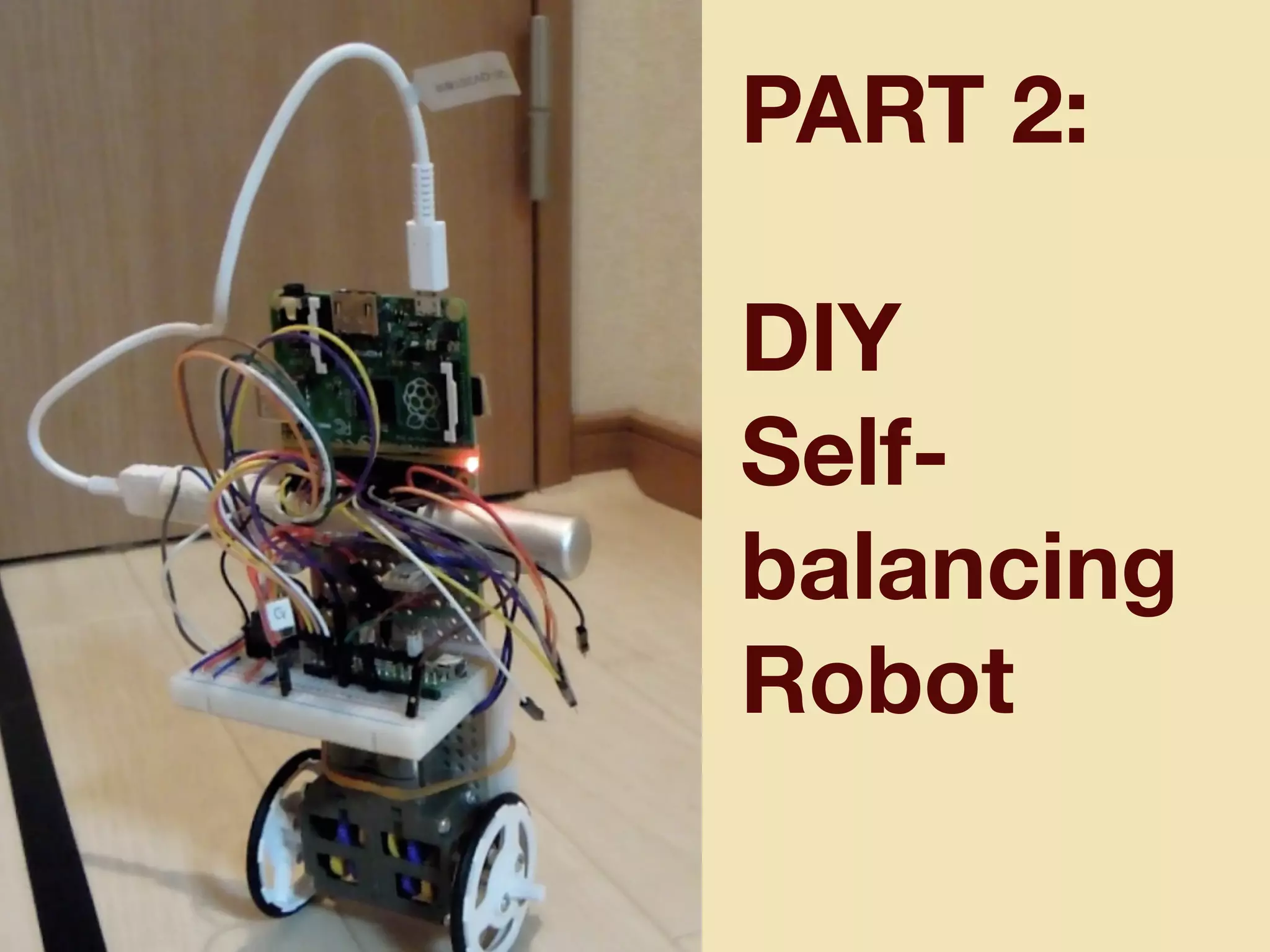
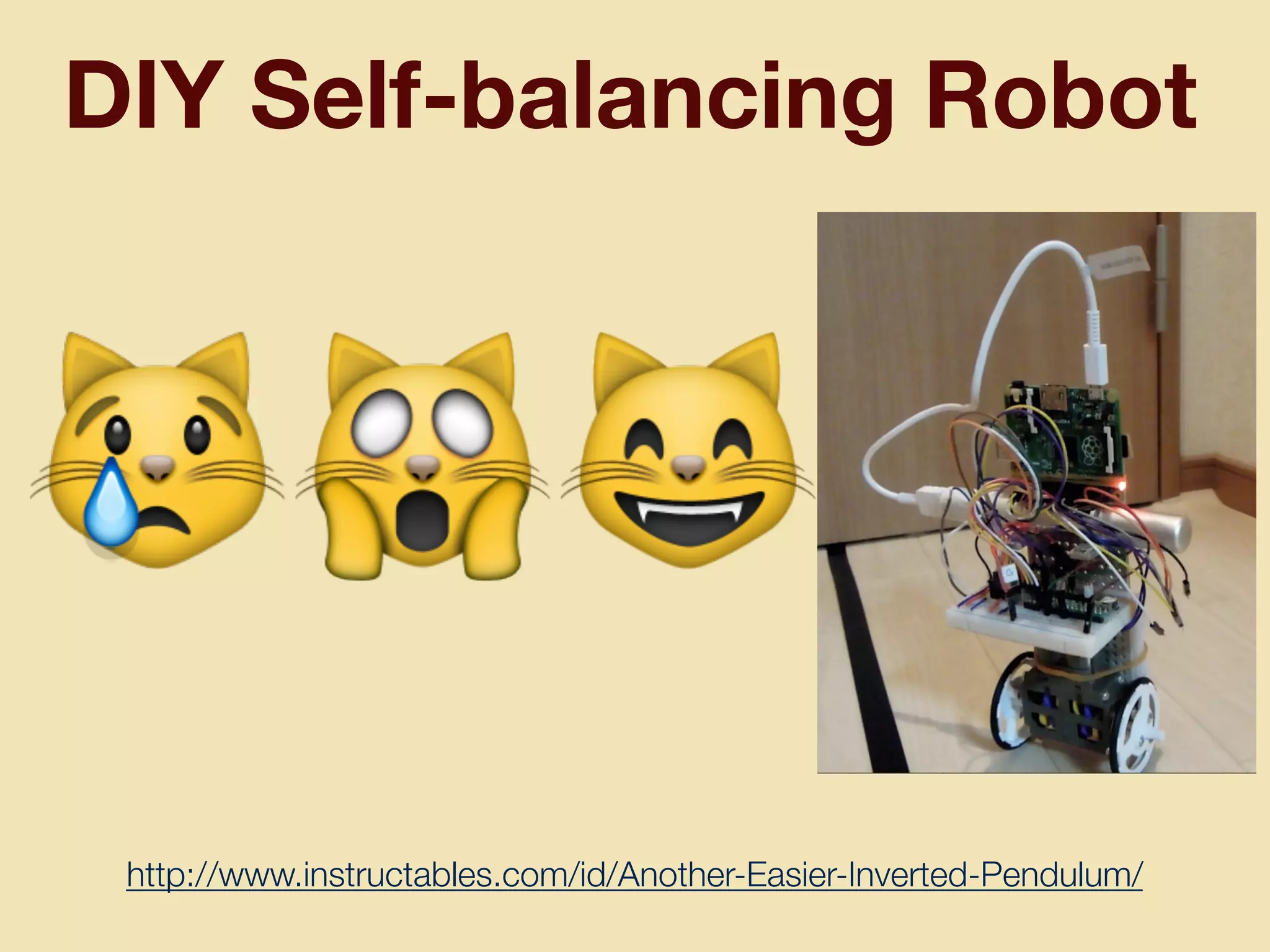
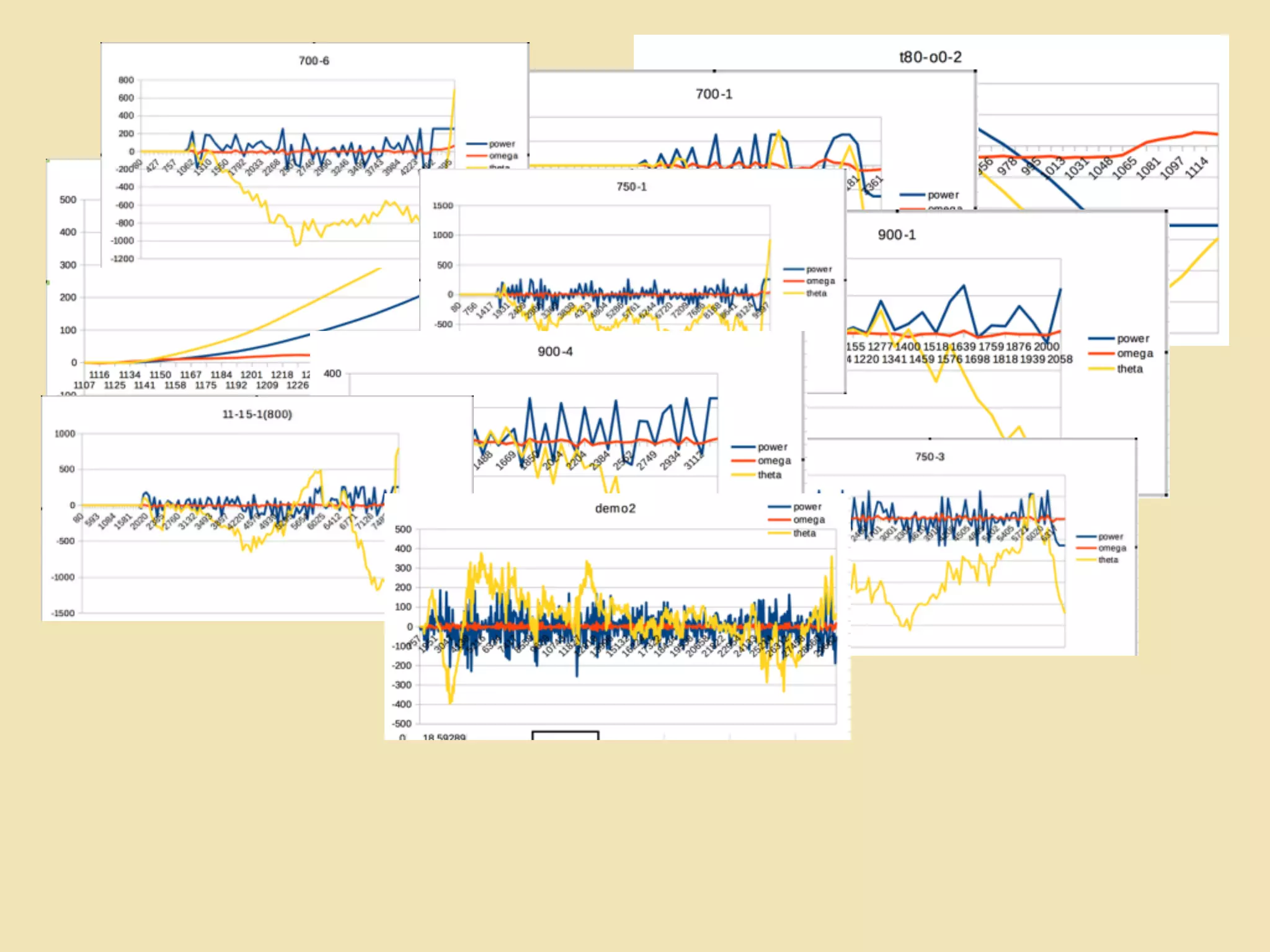

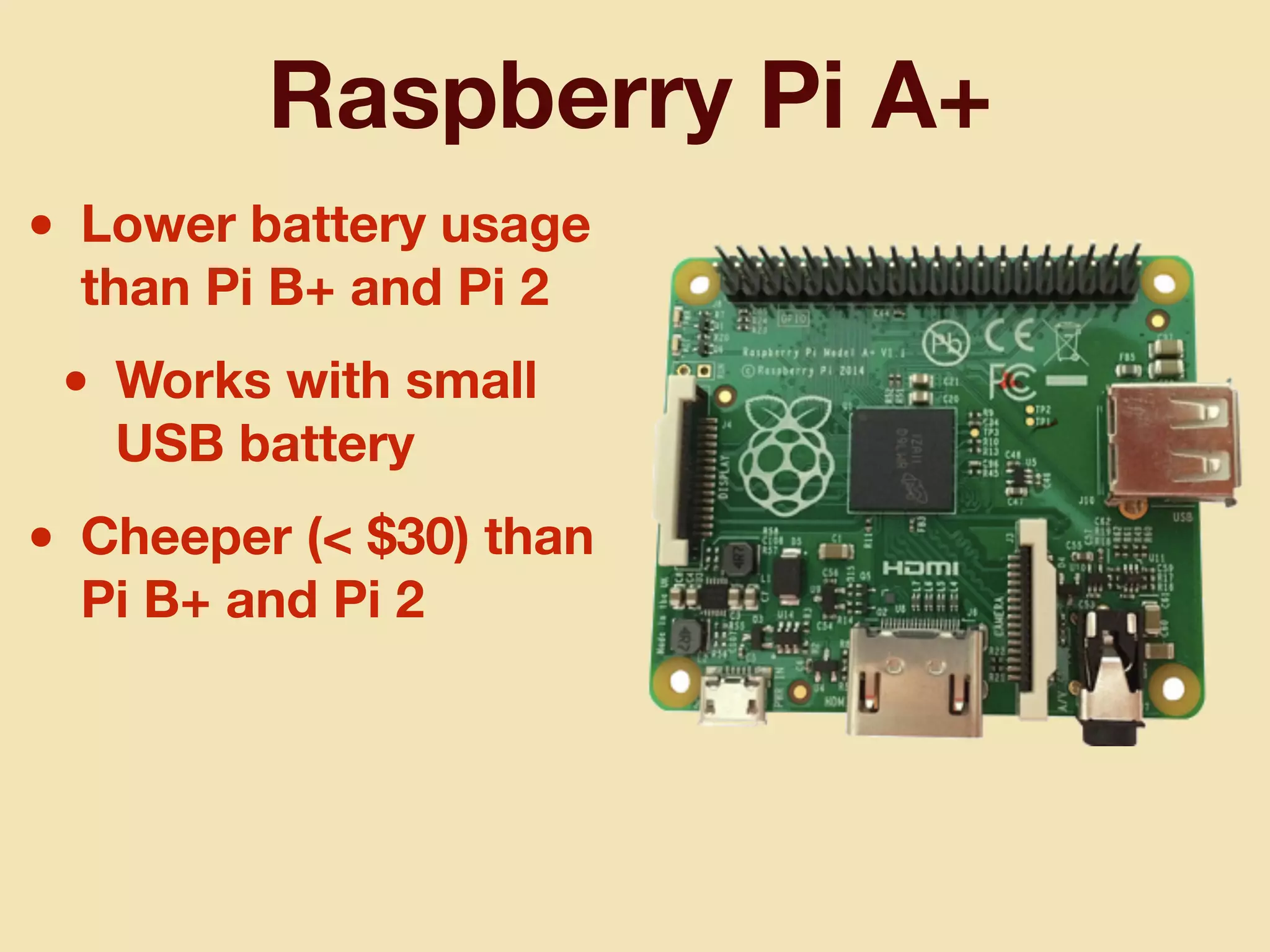
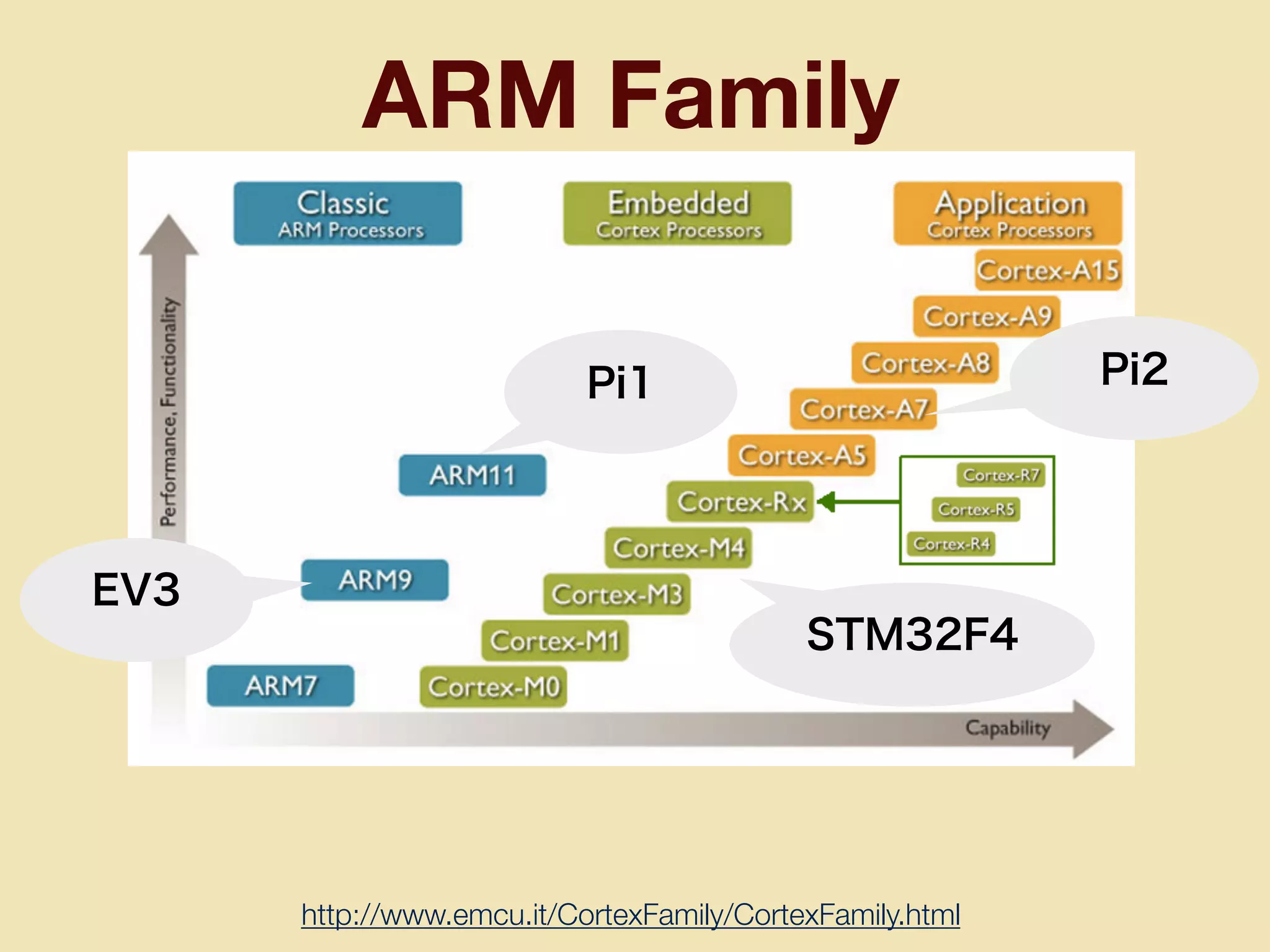
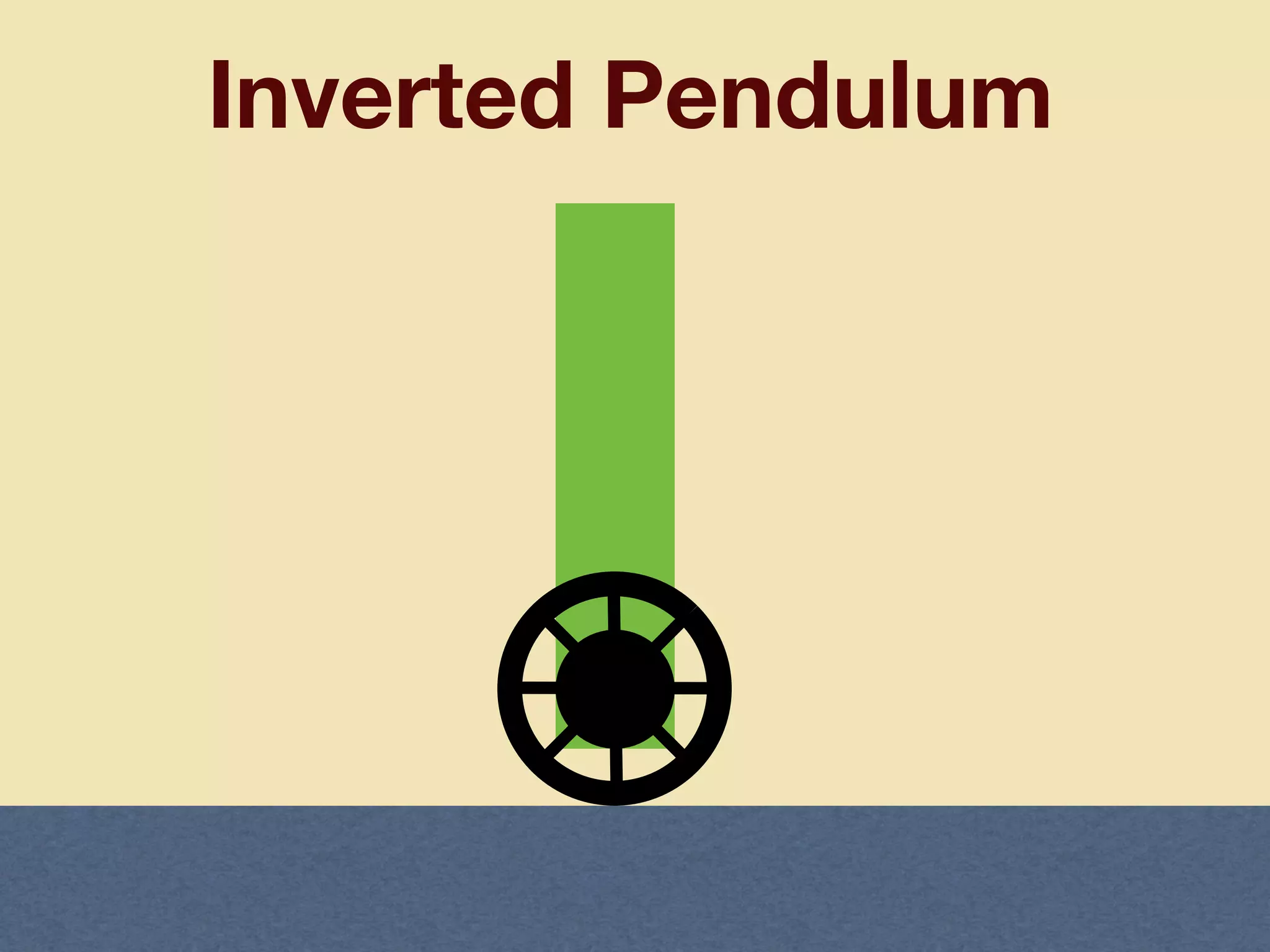
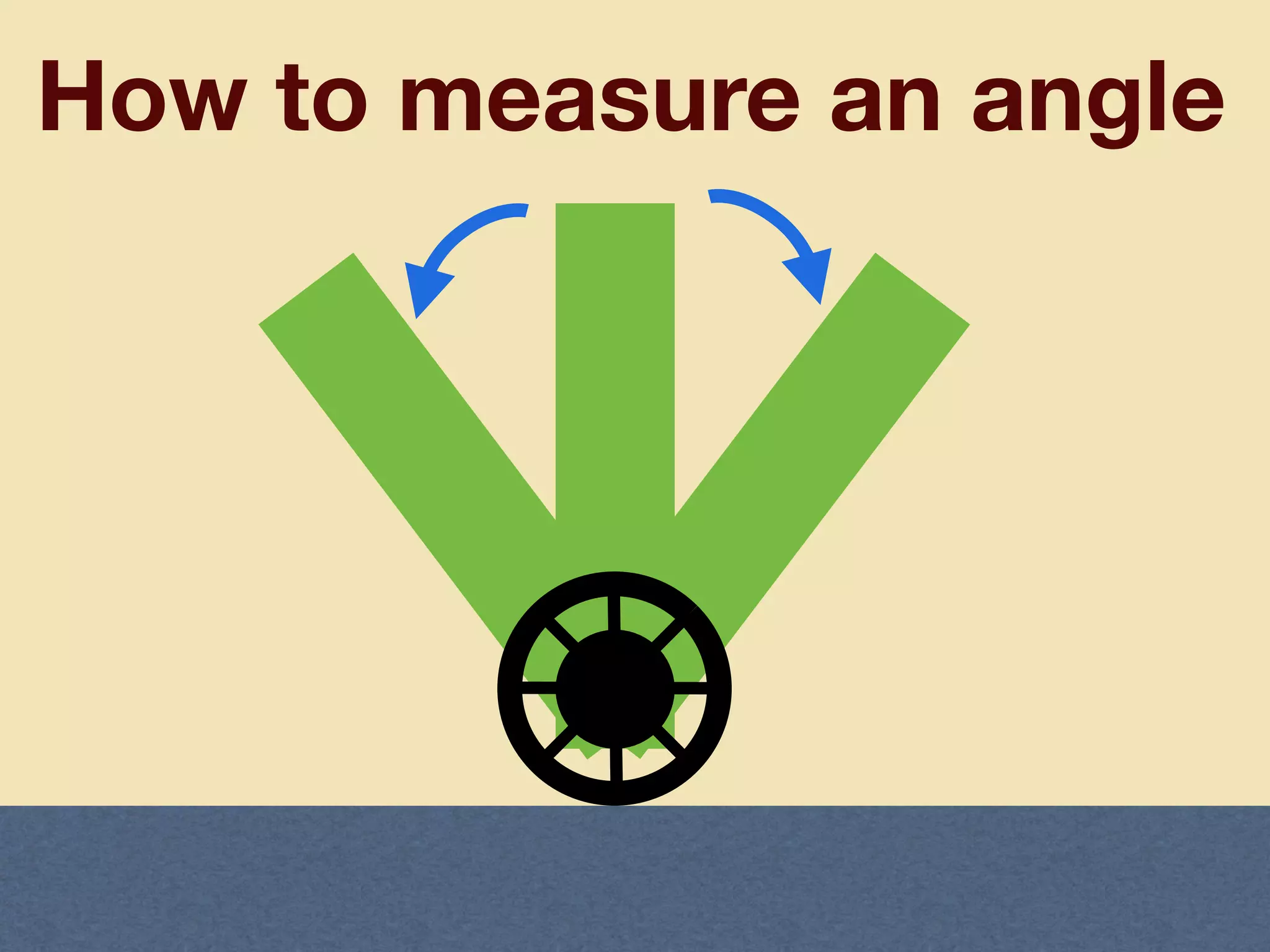
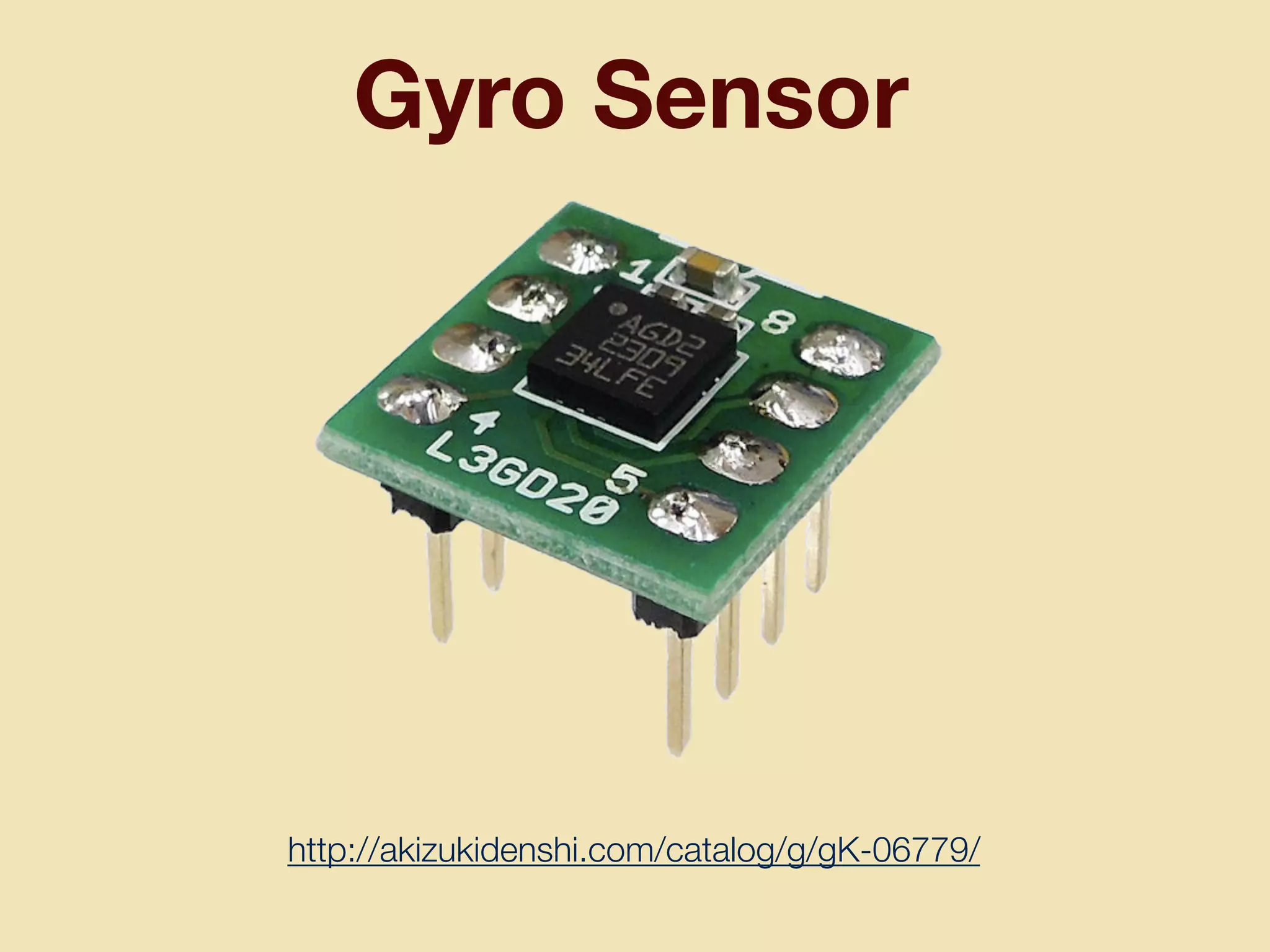
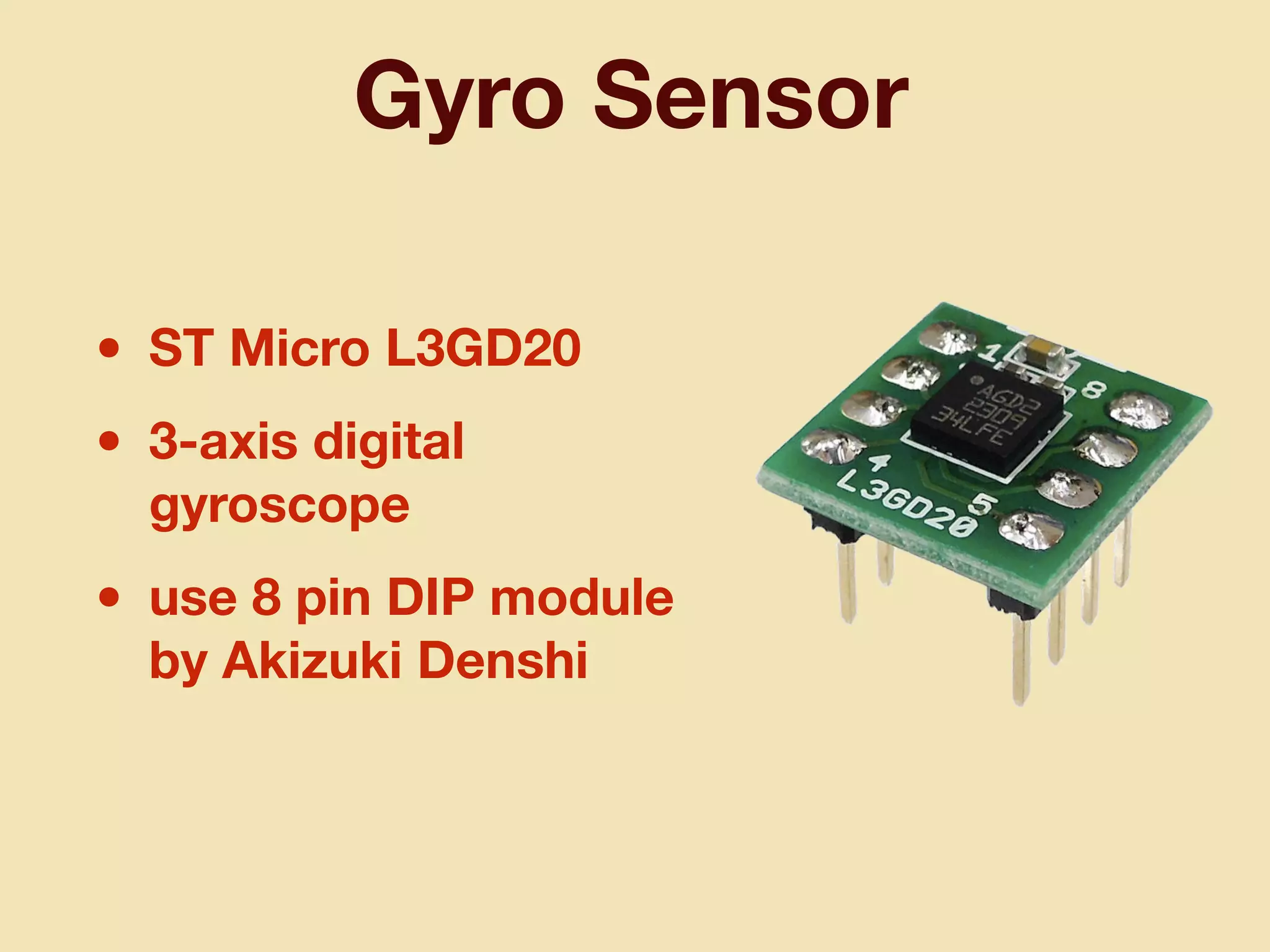
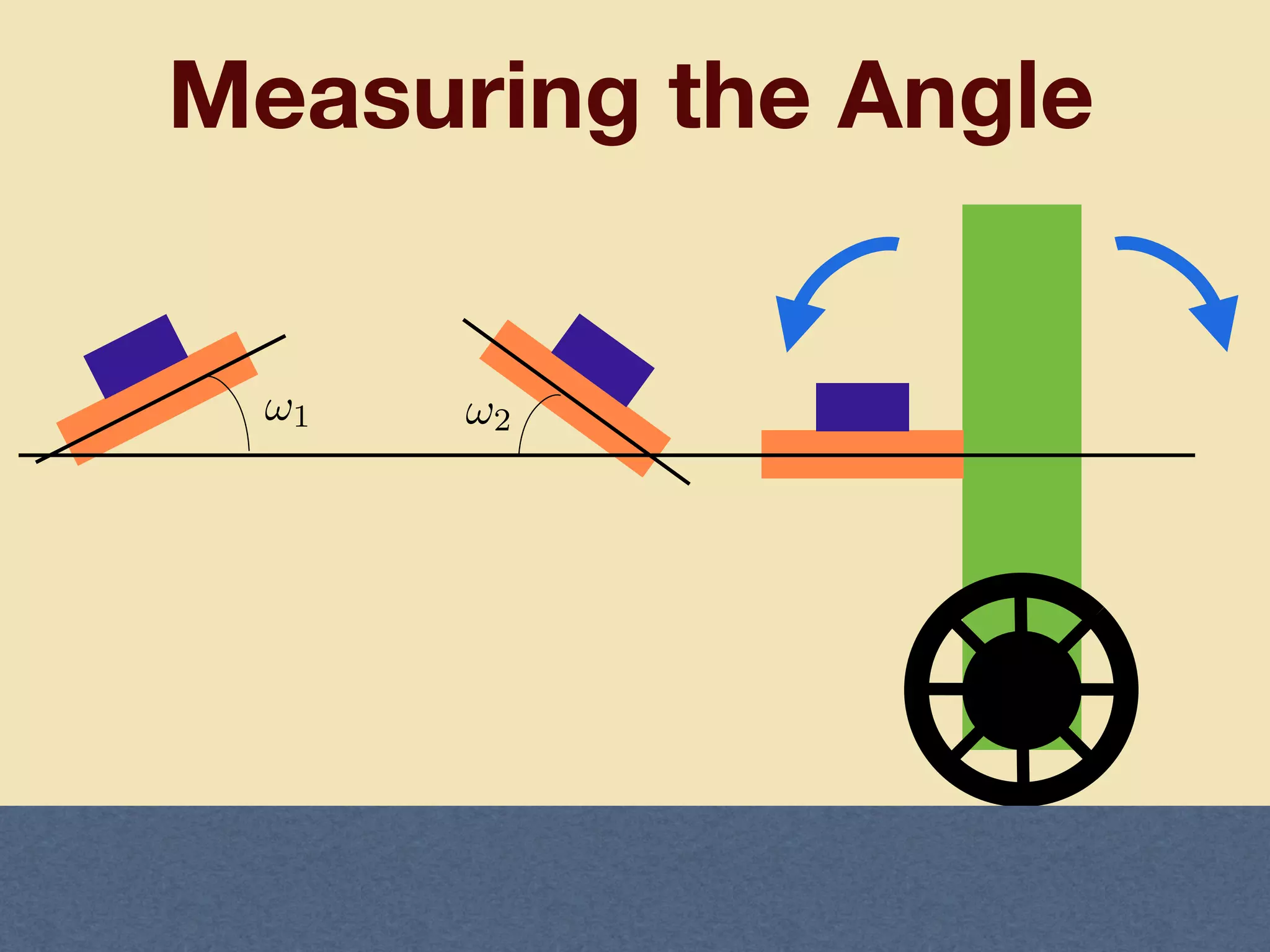
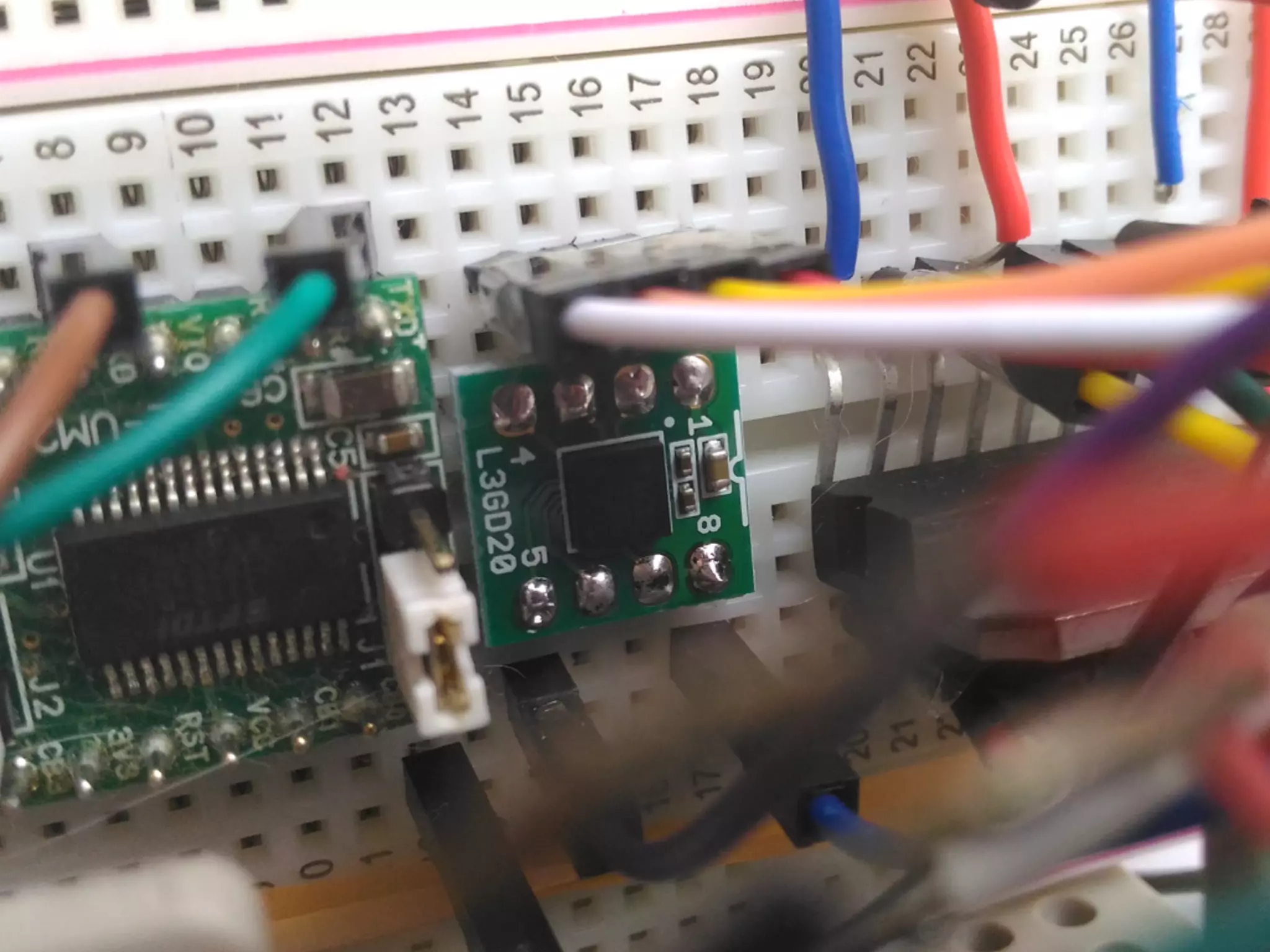
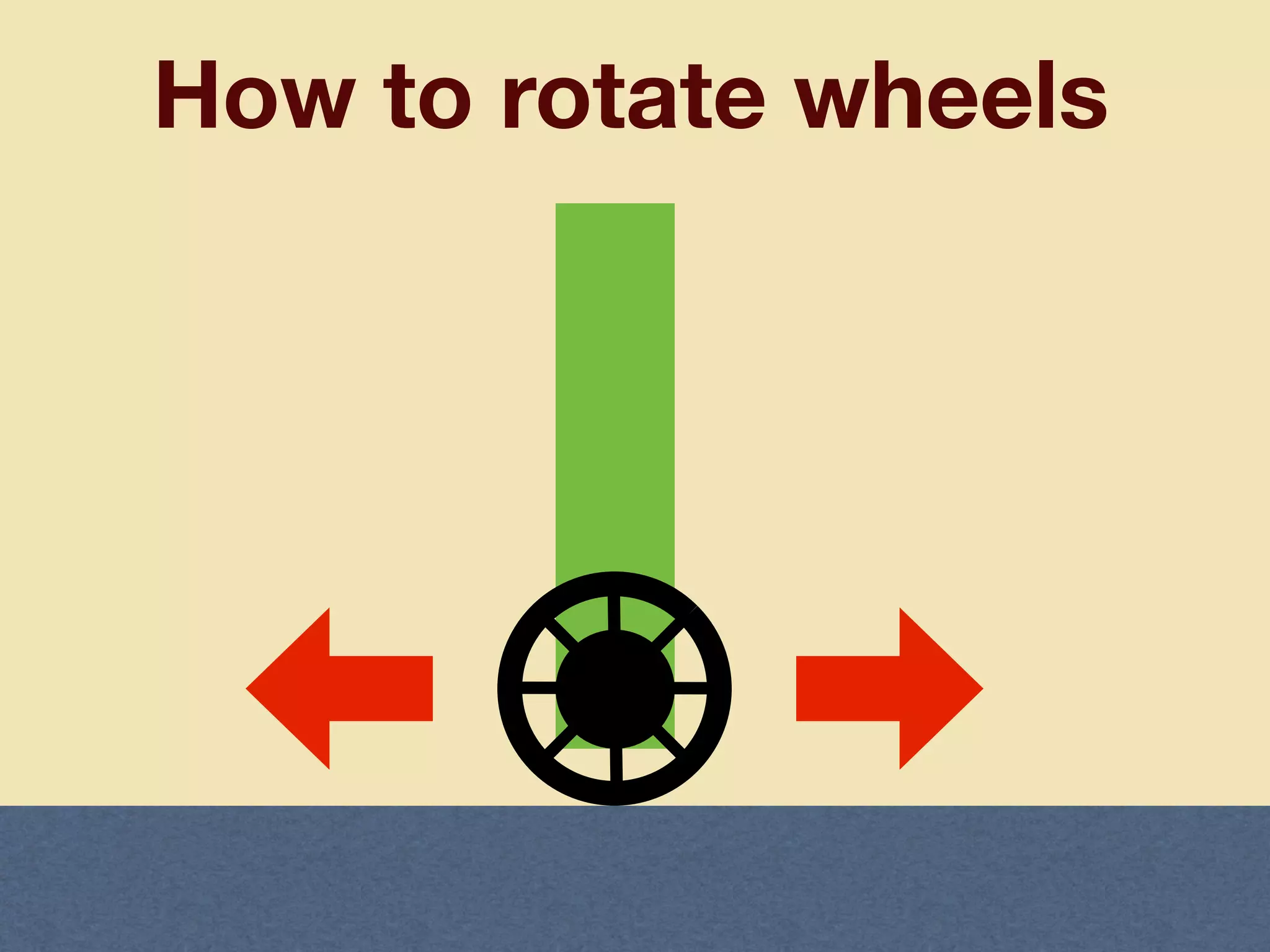
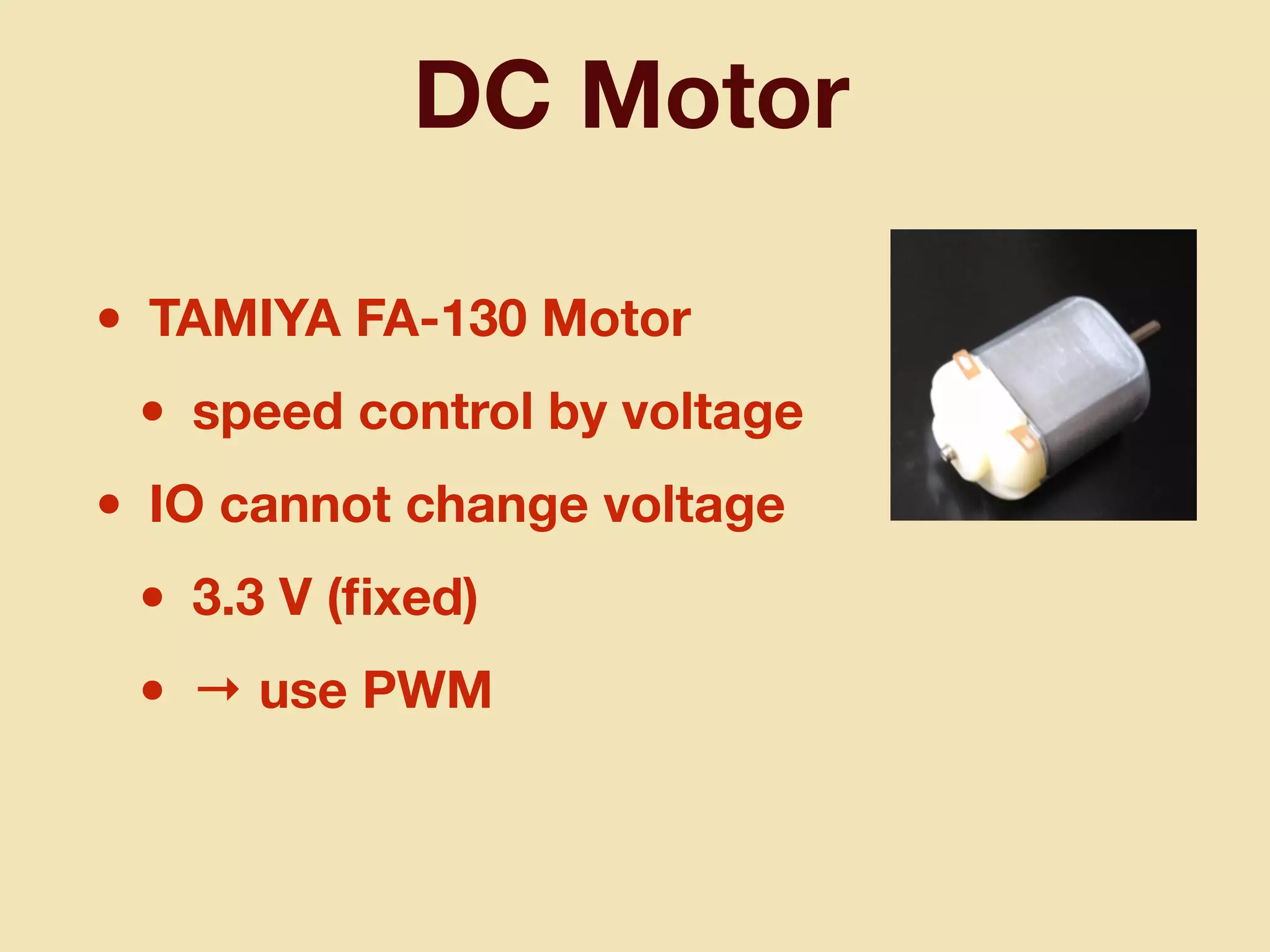


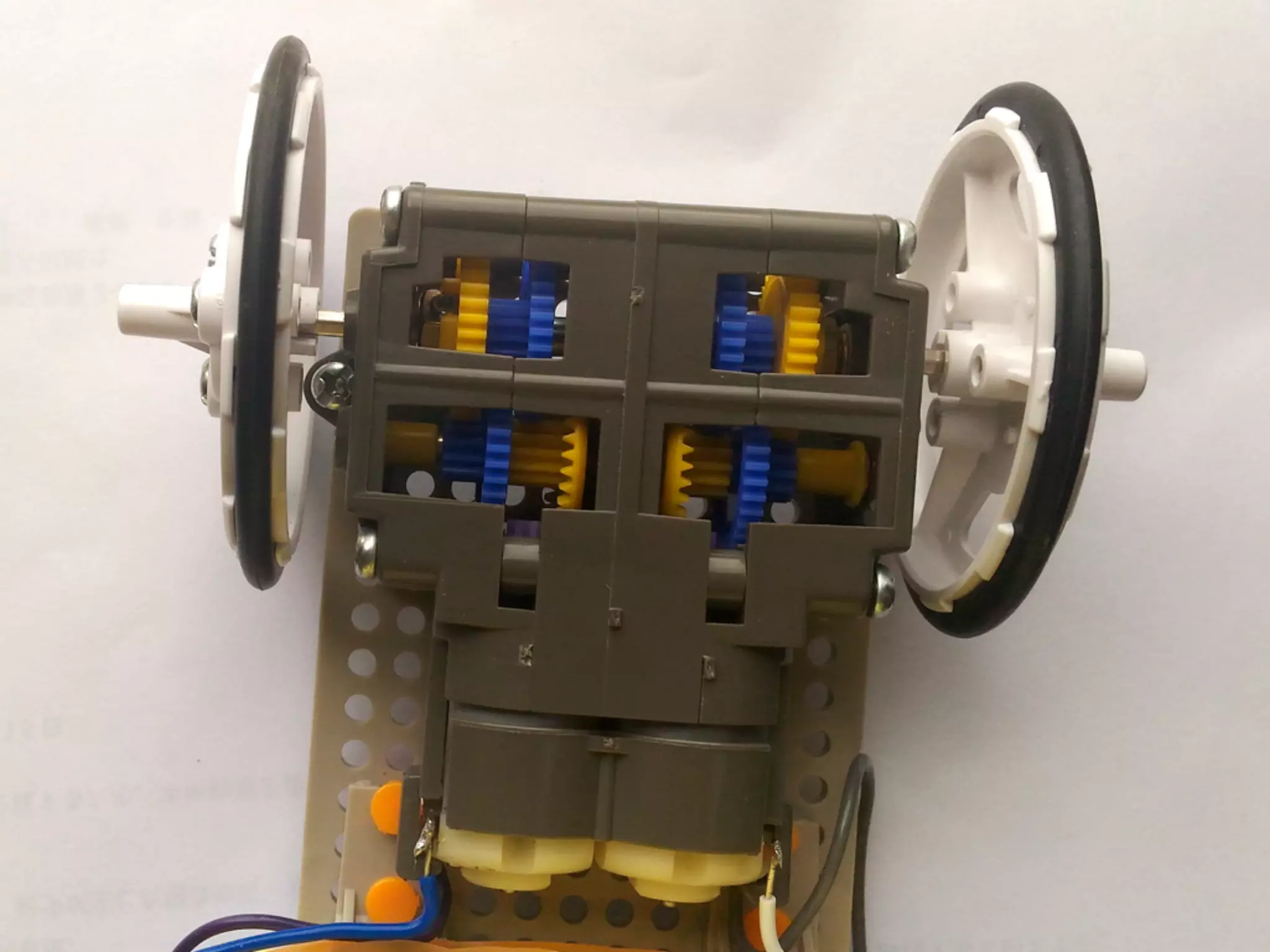
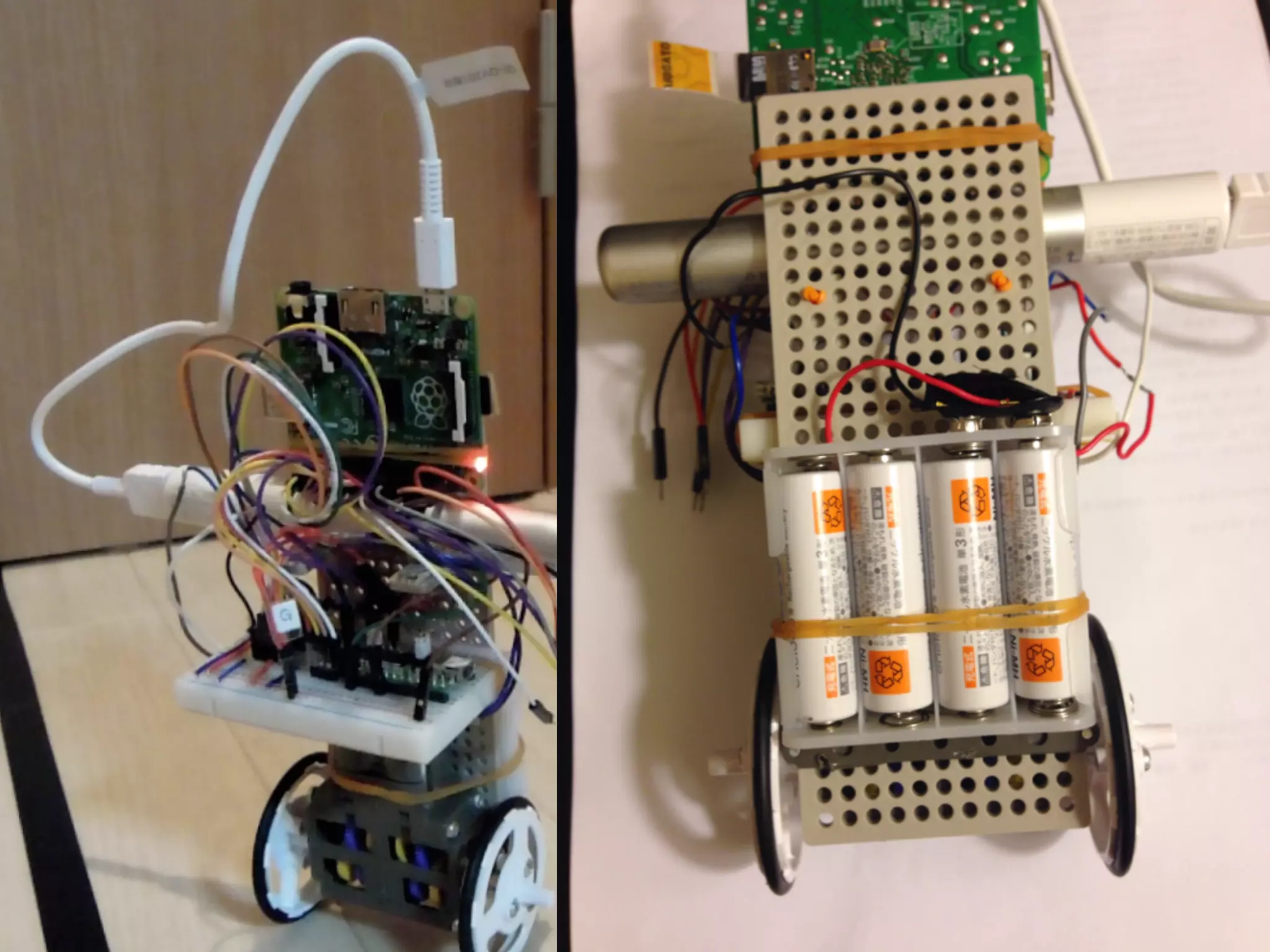
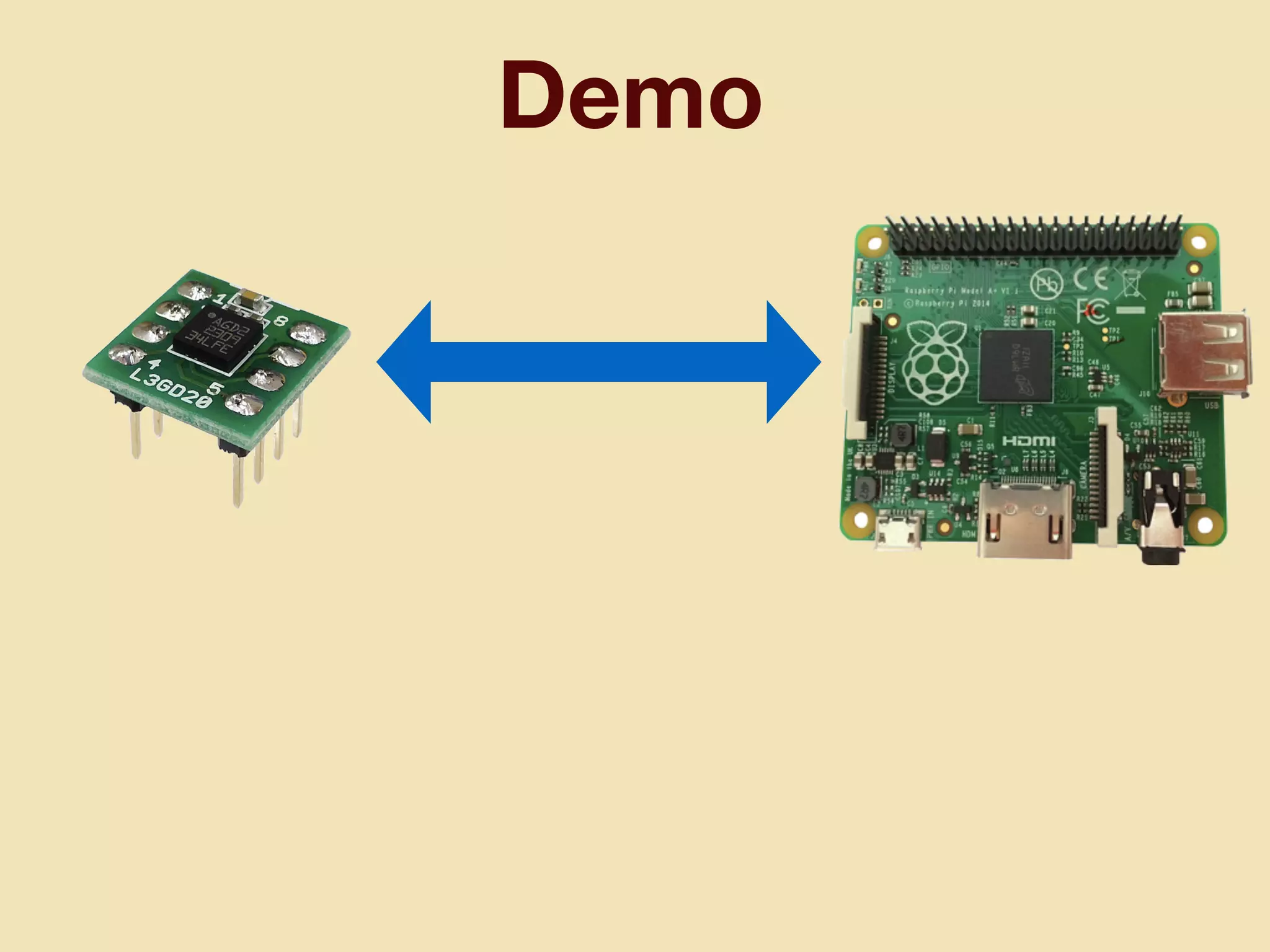
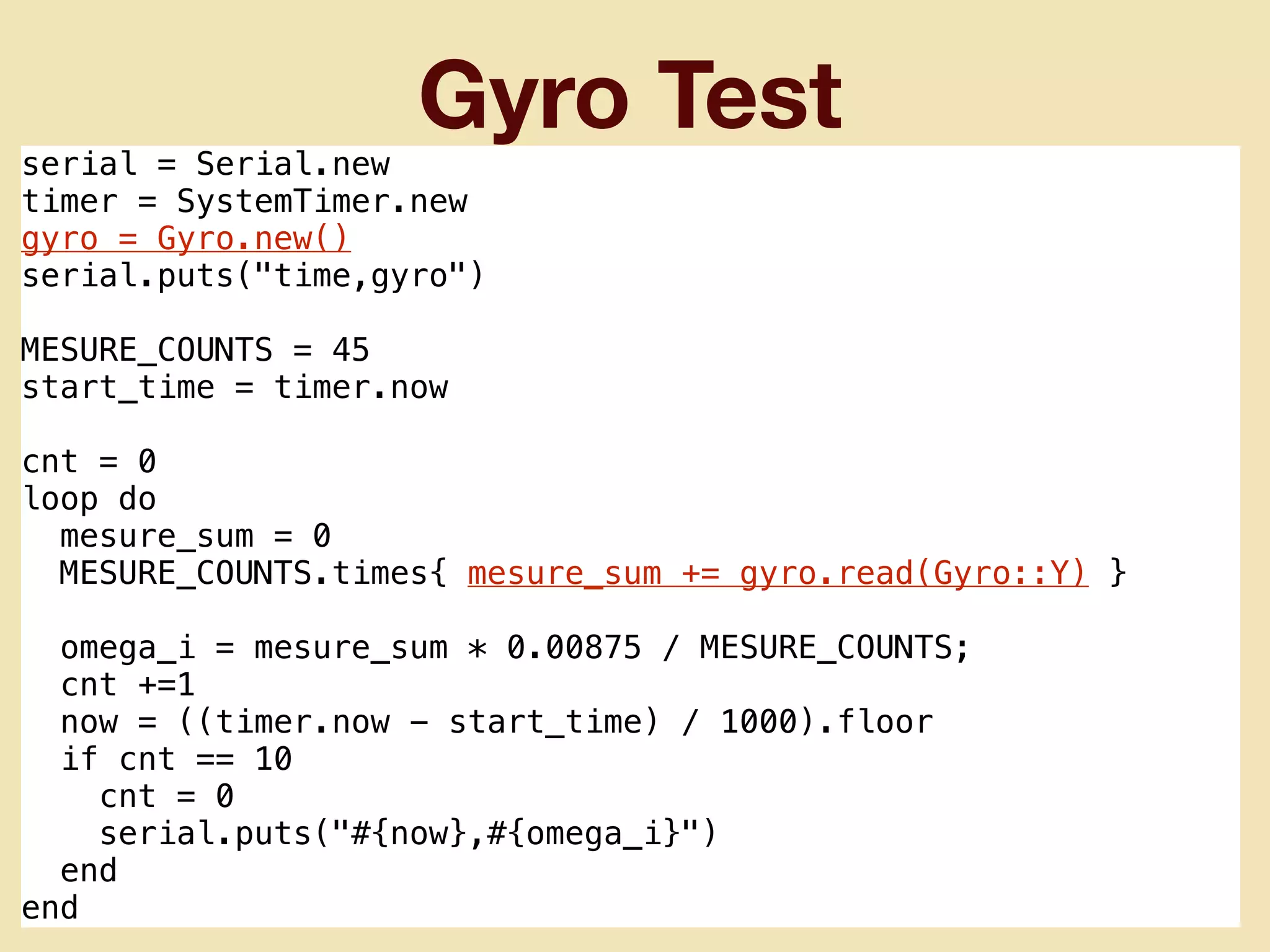
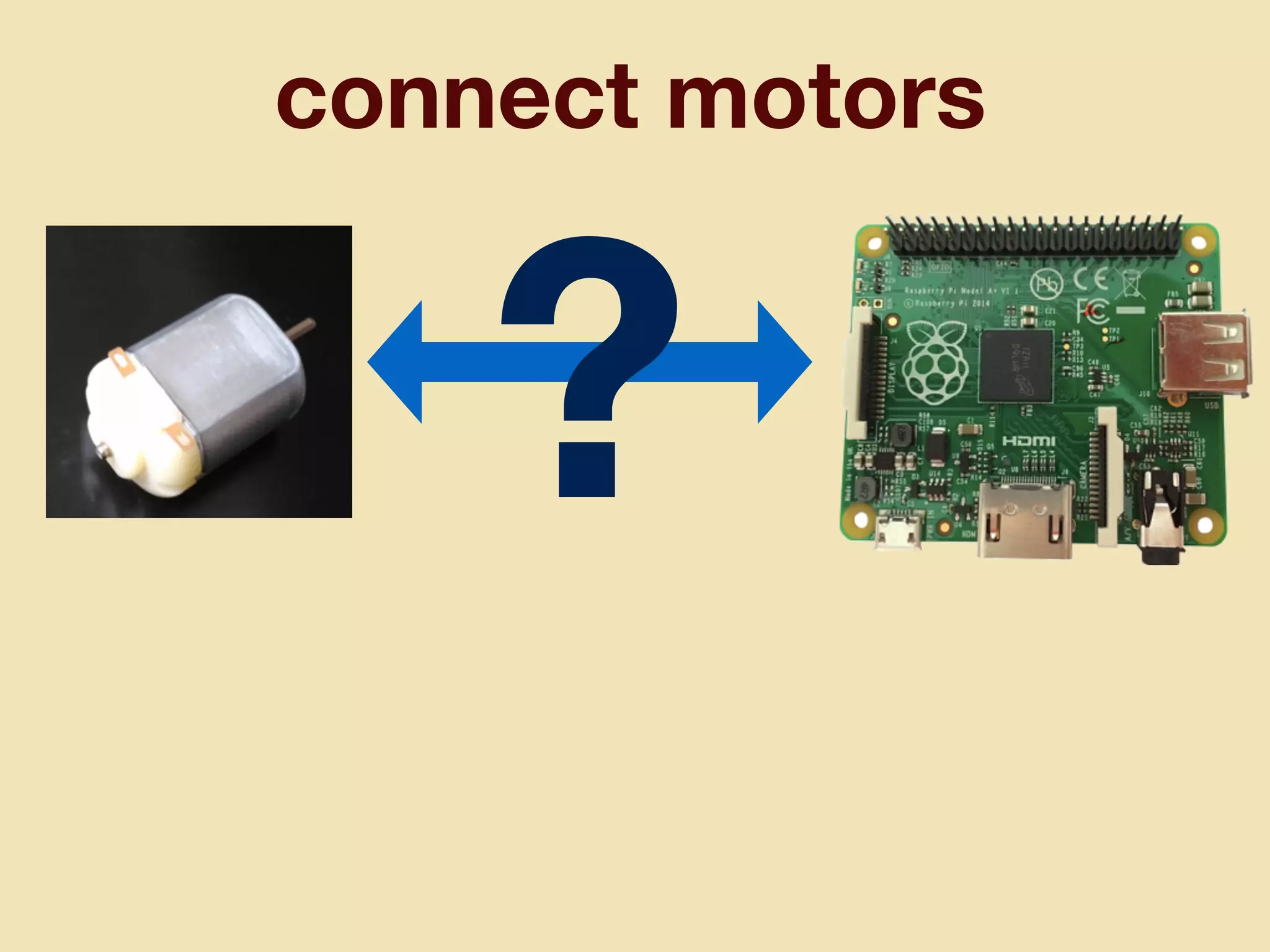
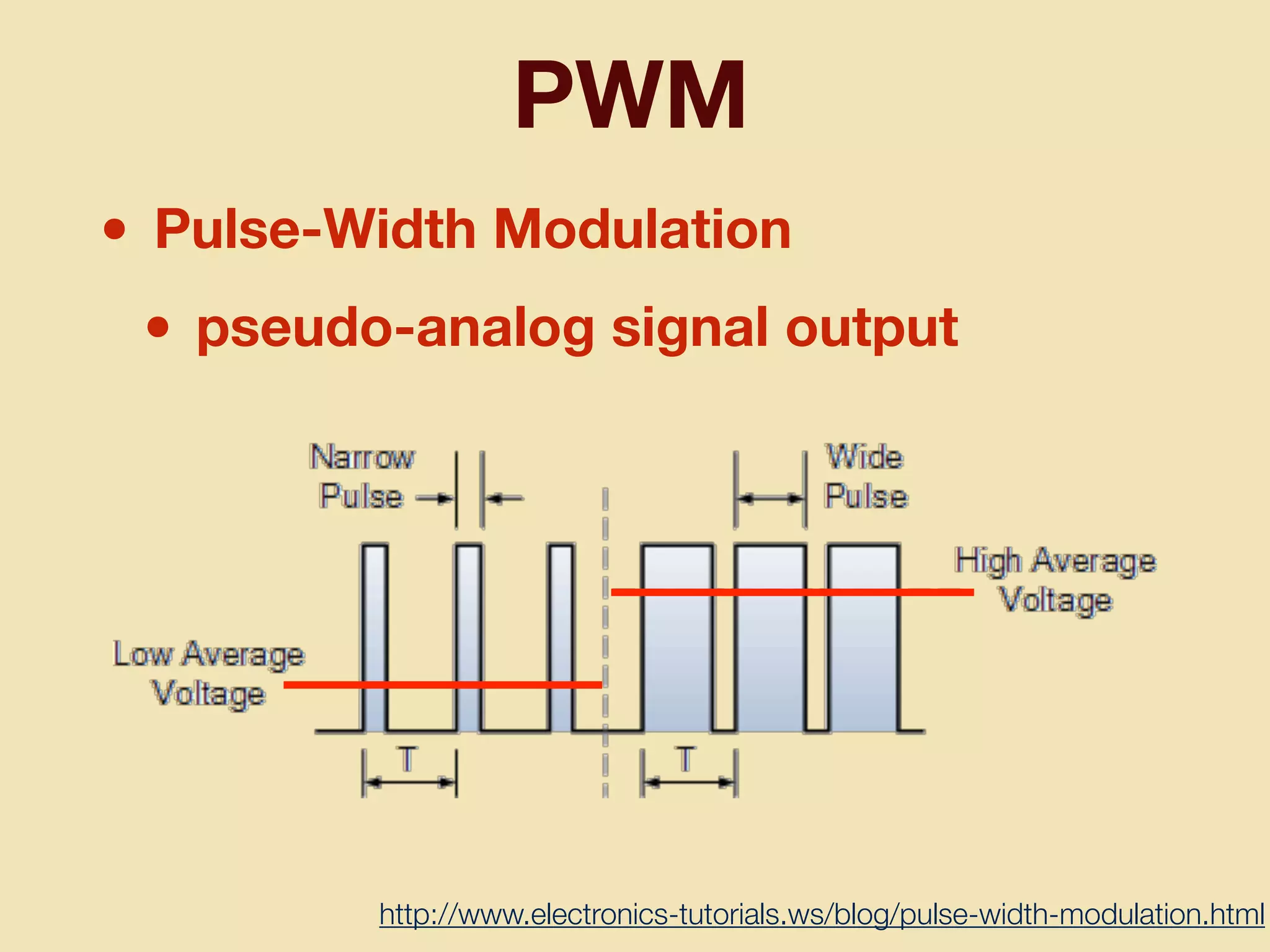

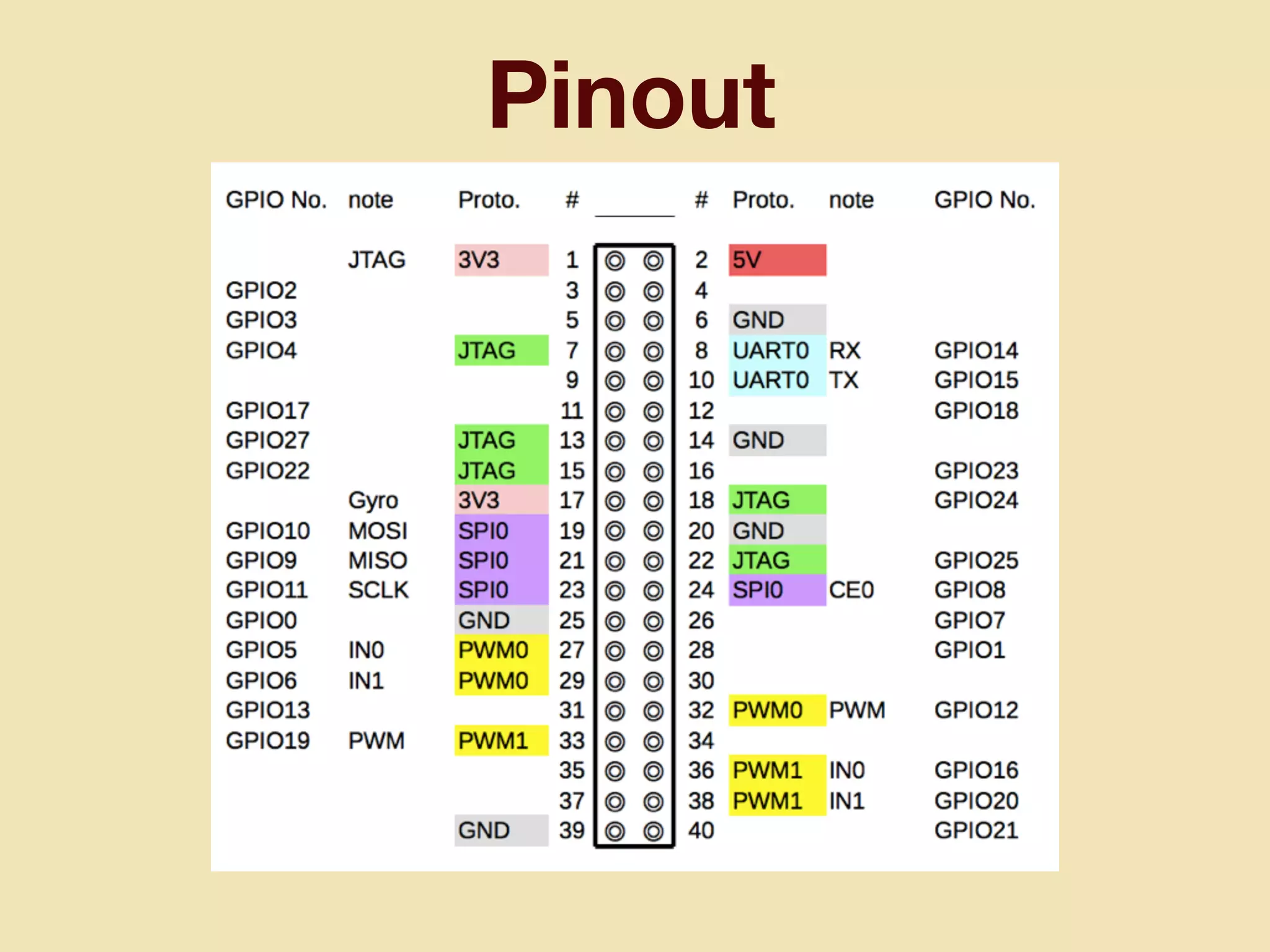
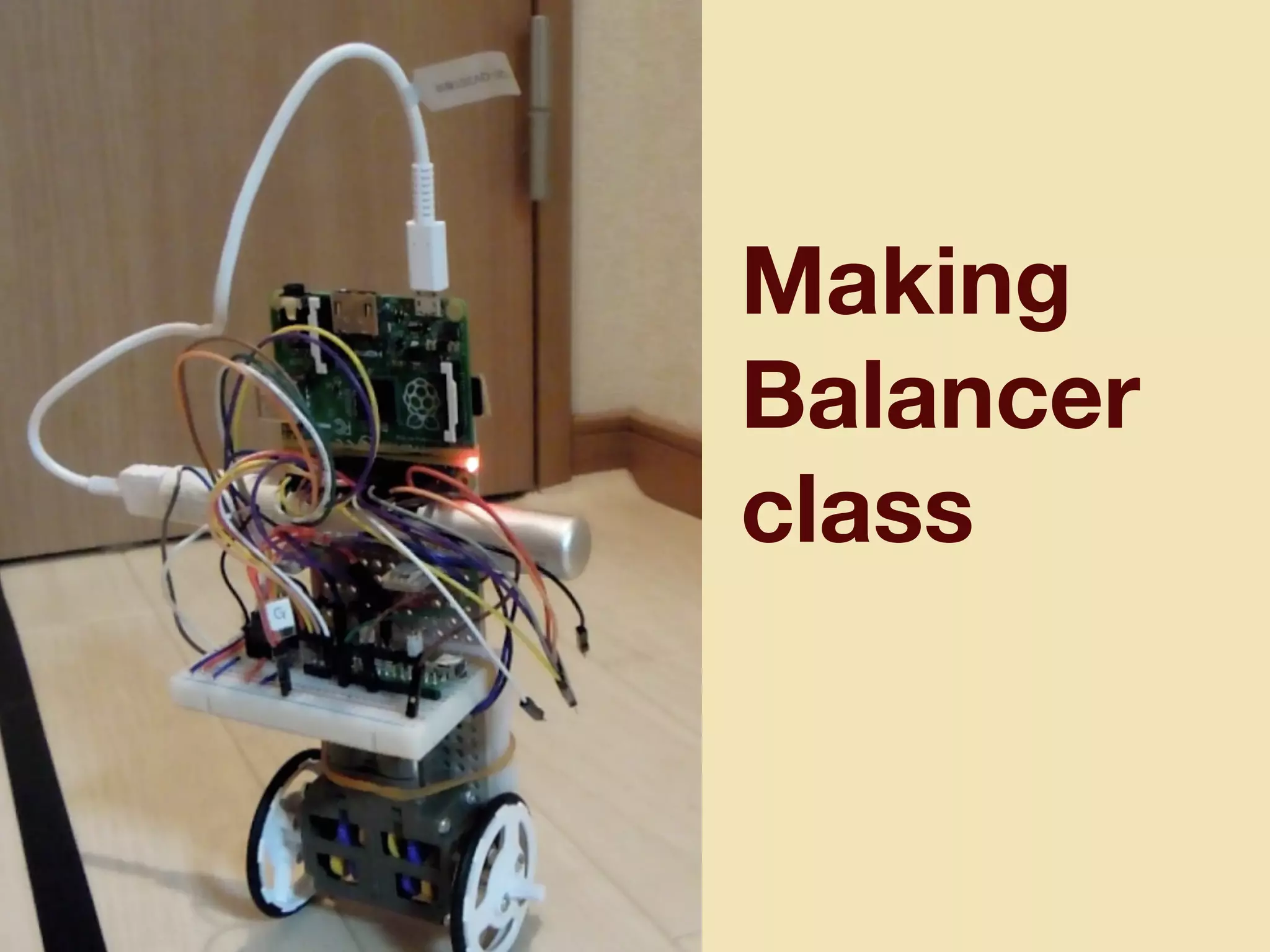
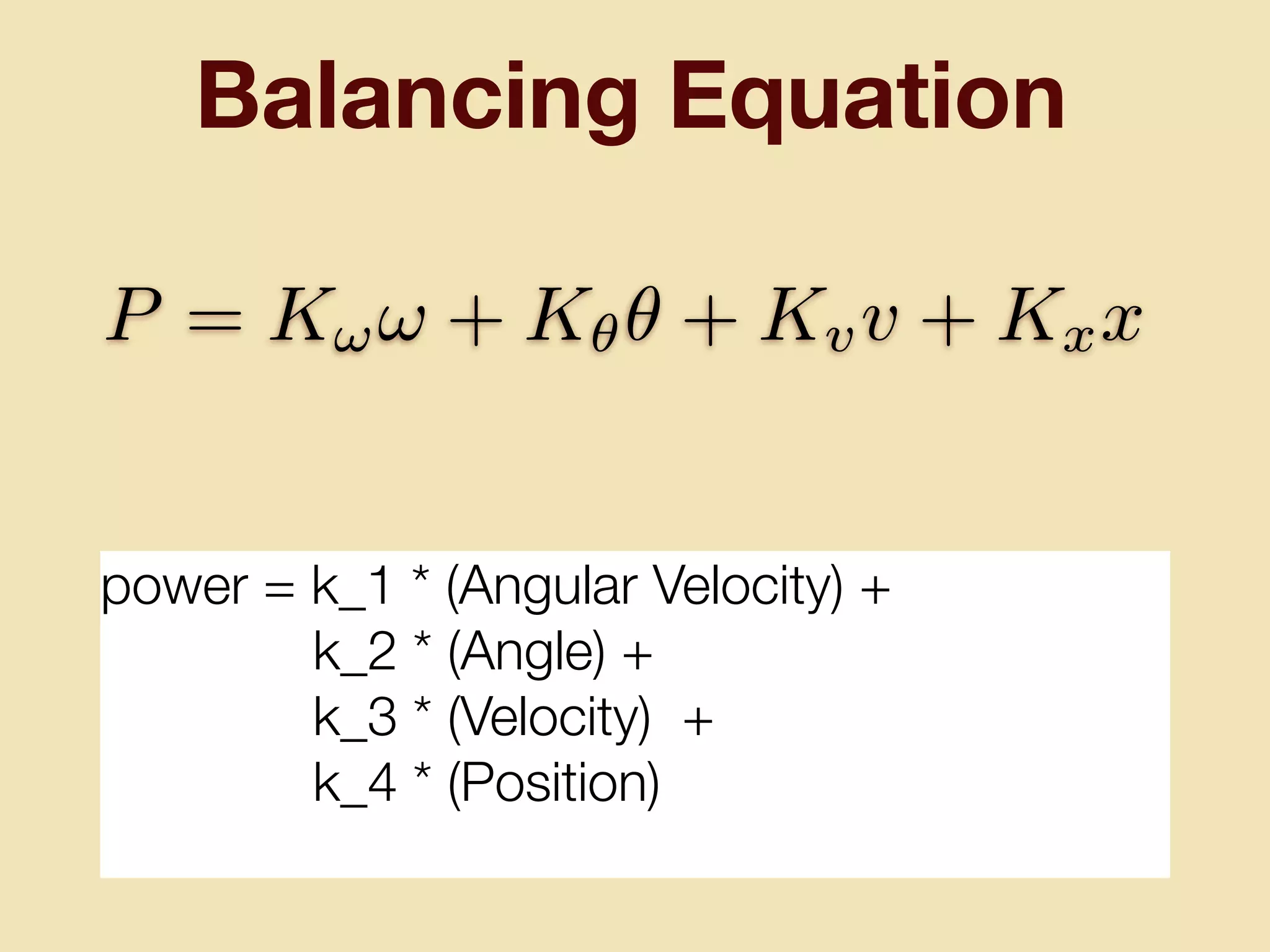
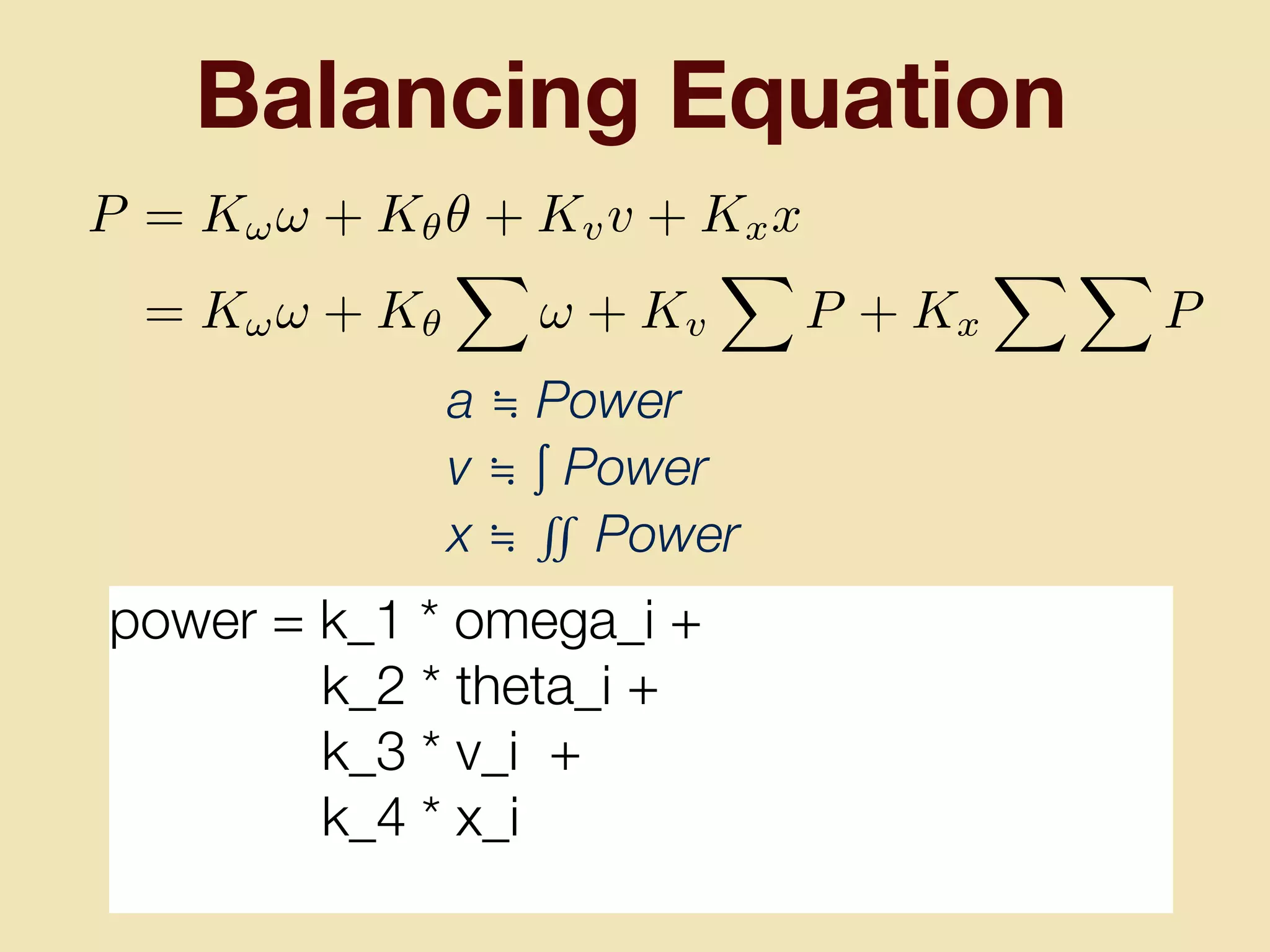
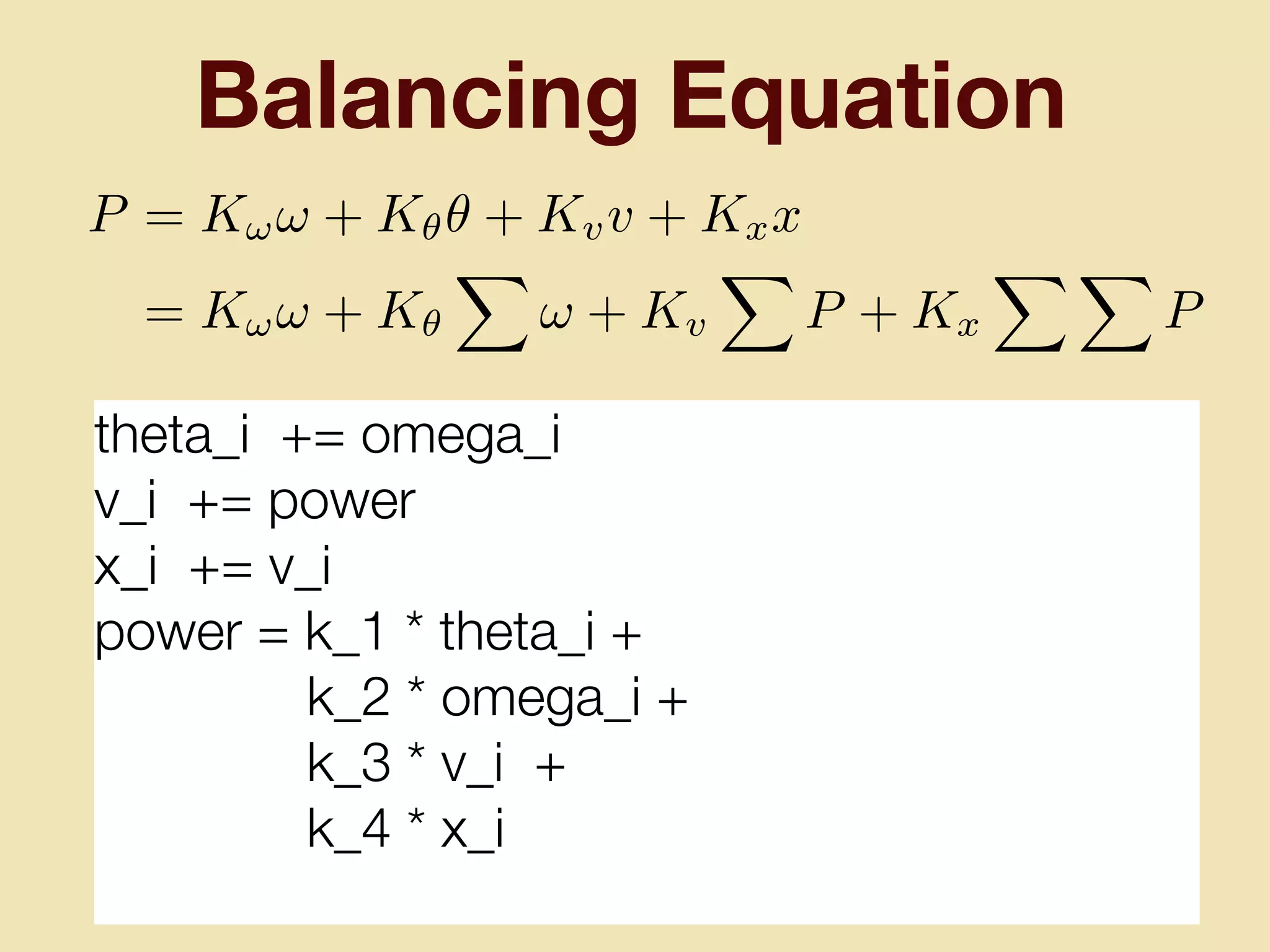
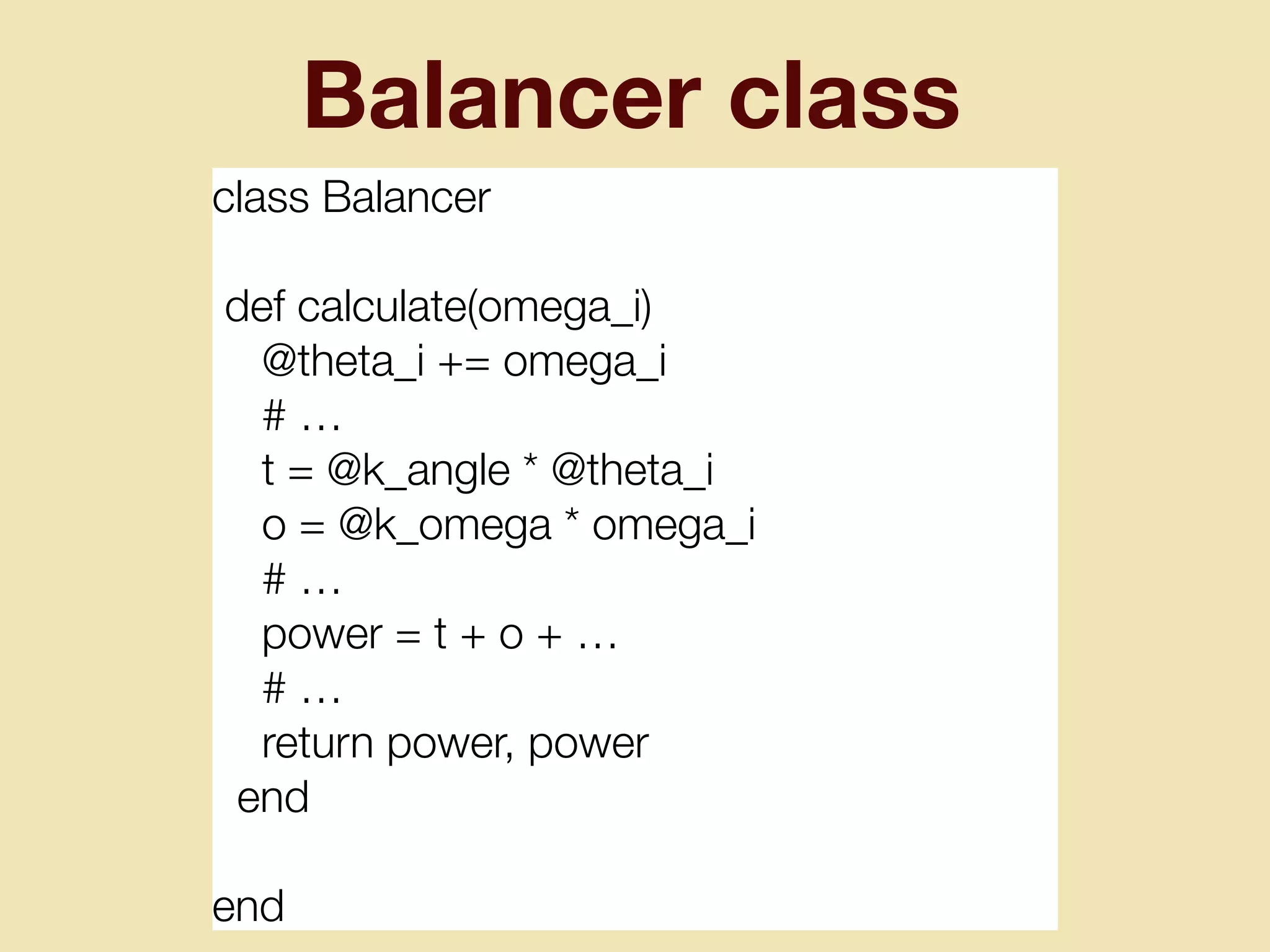
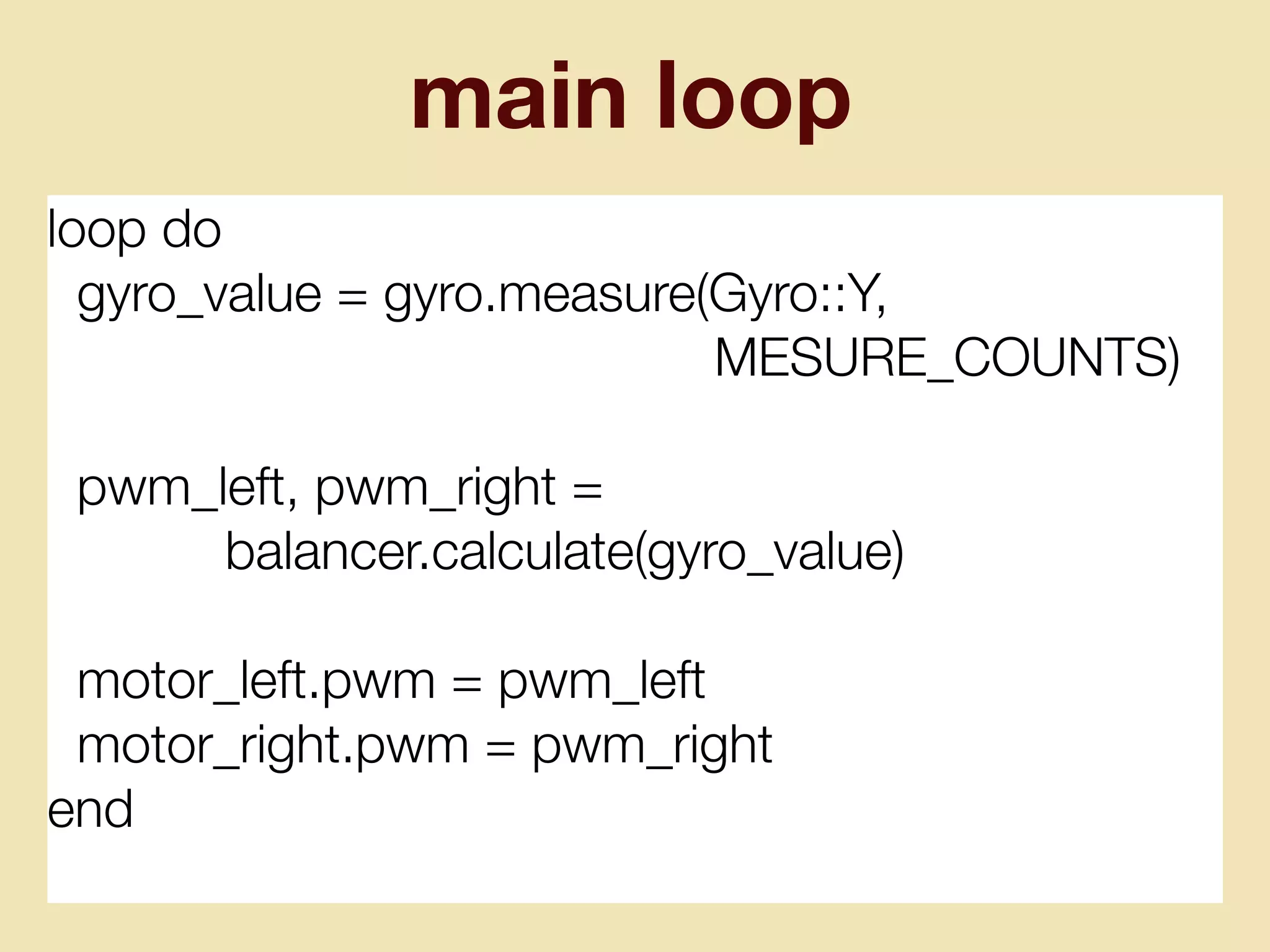
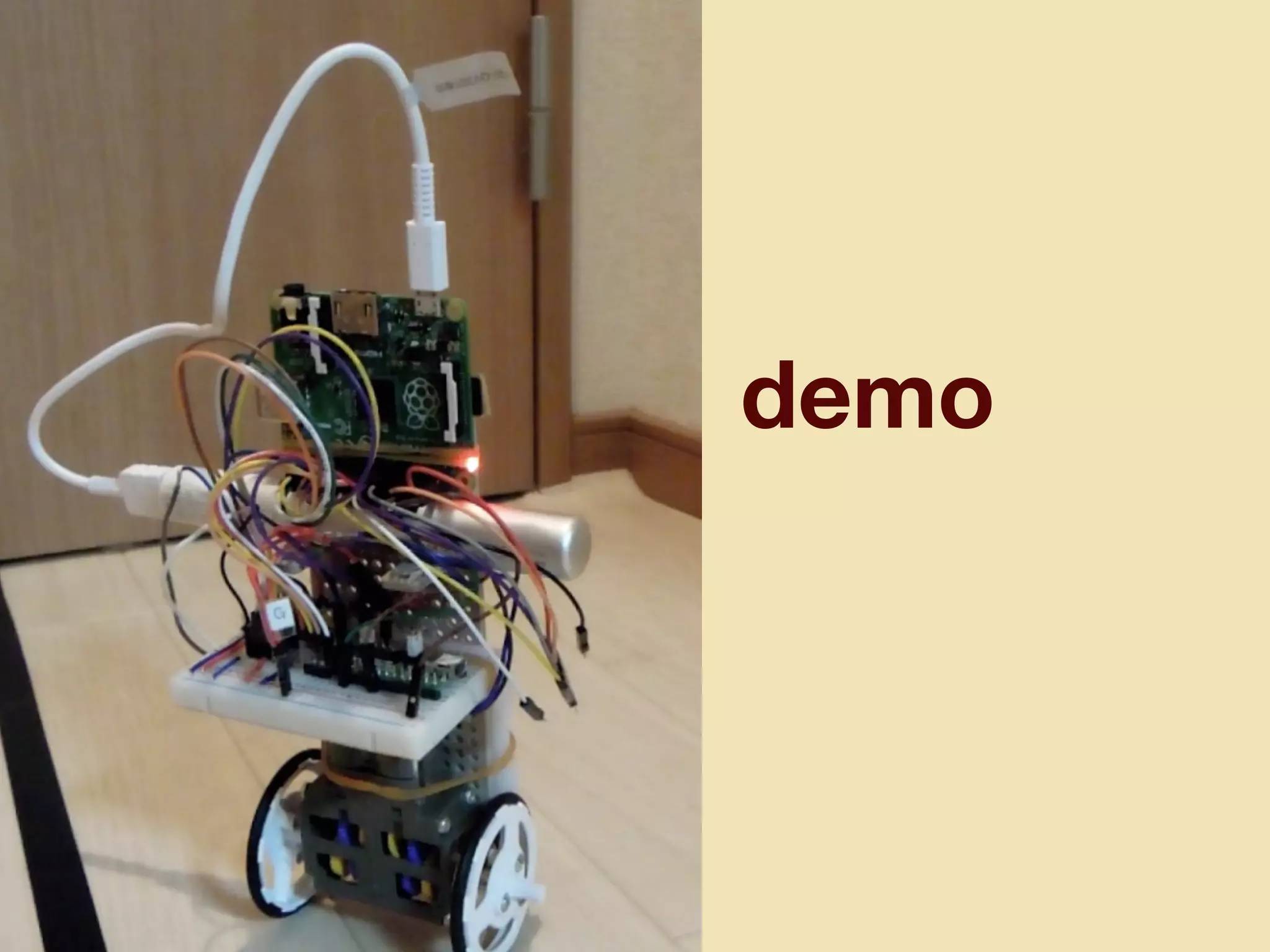
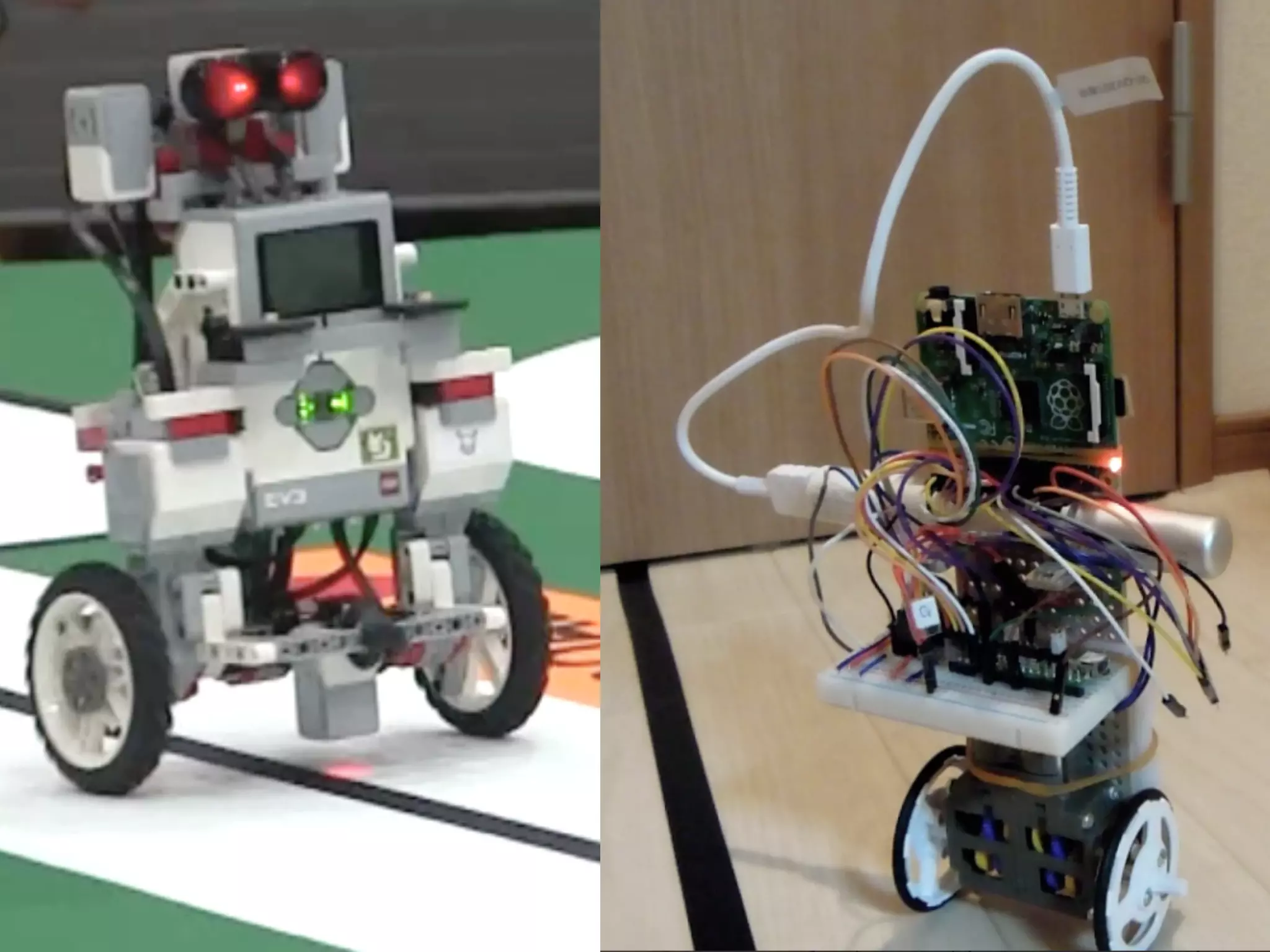

This document summarizes Yurie Yamane's presentation on using mruby to make robots. It discusses using mruby and TOPPERS on the LEGO EV3 to create an inverted pendulum self-balancing robot. It then covers creating a DIY self-balancing robot using a Raspberry Pi, gyro sensor, DC motors, and a motor driver. Code examples are provided for reading sensor values, controlling motors with PWM, and implementing a balancing algorithm using a balancer class. Source code links are included for further reference.











































































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)
















