The prject focuse on measurement of mass with load cell via strain gauge conveter with MAT LAB to get direct live measurement in tare and calibration phase.
12/17/2025 4
Introduction
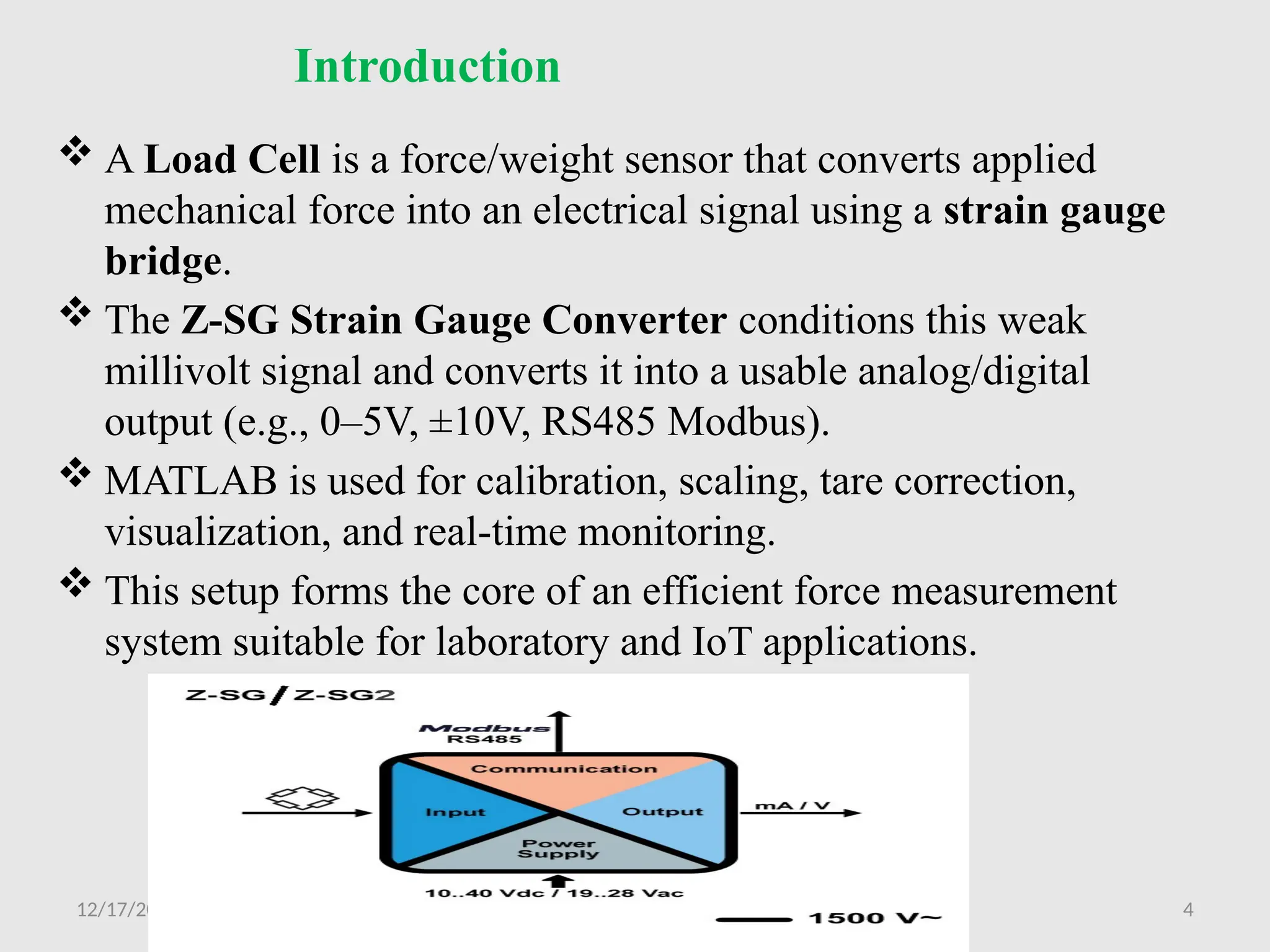
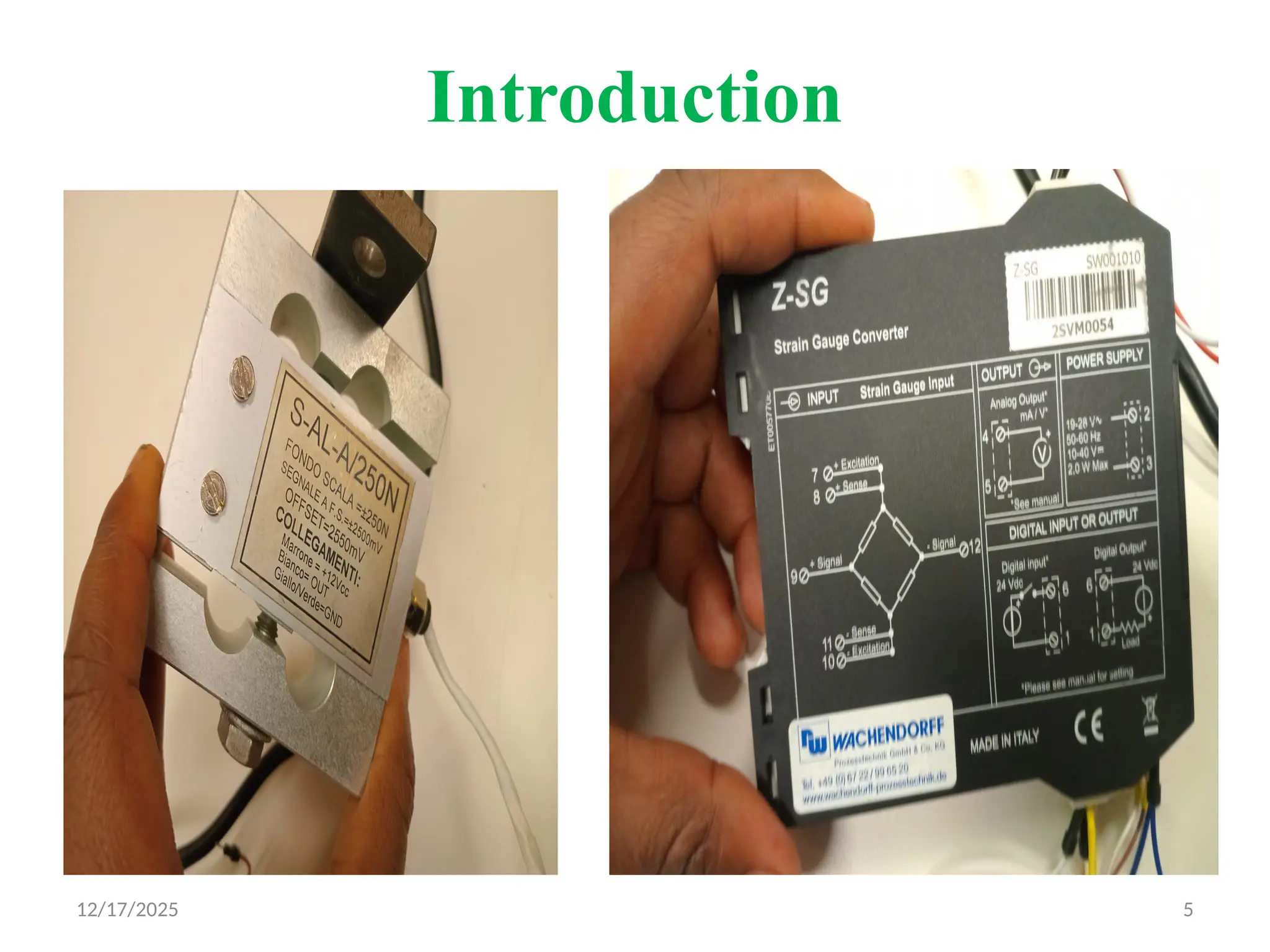
ALoad Cell is a force/weight sensor that converts applied
mechanical force into an electrical signal using a strain gauge
bridge.
The Z-SG Strain Gauge Converter conditions this weak
millivolt signal and converts it into a usable analog/digital
output (e.g., 0–5V, ±10V, RS485 Modbus).
MATLAB is used for calibration, scaling, tare correction,
visualization, and real-time monitoring.
This setup forms the core of an efficient force measurement
system suitable for laboratory and IoT applications.
12/17/2025 6
Significance ofStudy
Improved Measurement Accuracy
Essential for experiments requiring high sensitivity, such as tissue testing and
micro-force analysis.
MATLAB Simulation for Biomedical Force Sensing
To simulate force measurement from a strain gauge-based load cell (S-AL 250N)
using MATLAB, enabling biomechanical signal processing for medical applications
such as prosthetics, rehabilitation, and tissue testing.
The project successfully developed a precise force measurement system using
a load cell and Z-SG converter with MATLAB. By applying scaling, tare
correction, and calibration, the system delivered accurate real-time force data
in Newtons and millivolts with minimal error. These improvements make the
setup suitable for industrial weighing systems, robotics force sensing,
material testing, and automation applications.
7.
12/17/2025 7
Objectives
General Objective
Todevelop a hardware setup and MATLAB simulation
of a Z-SG strain gauge converter integrated with a
load cell.
Specific Objectives
To scale Modbus-acquired data for accurate
measurement in Newtons (N) and millivolts (mV).
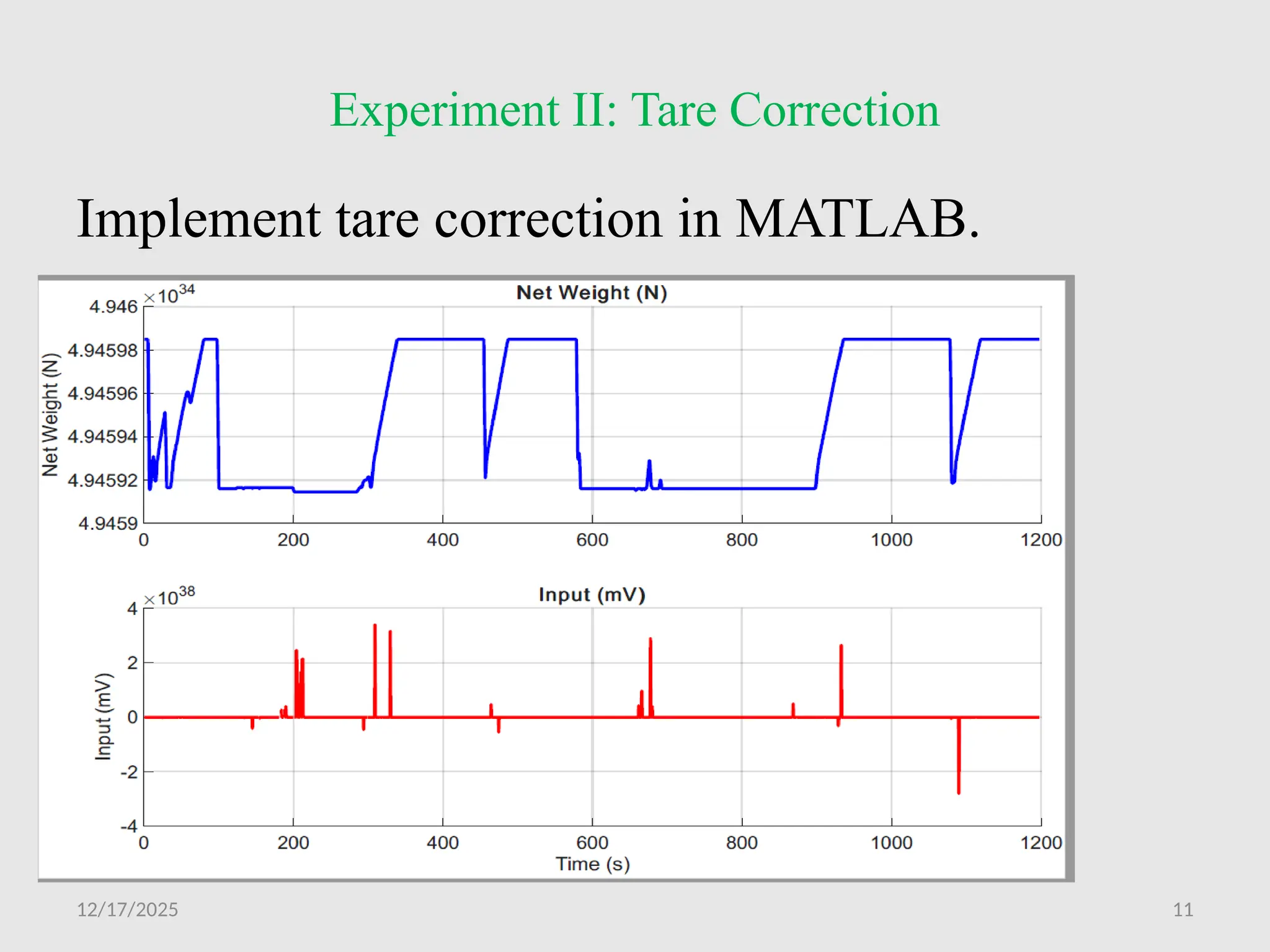
To implement tare correction in MATLAB for baseline
adjustment.
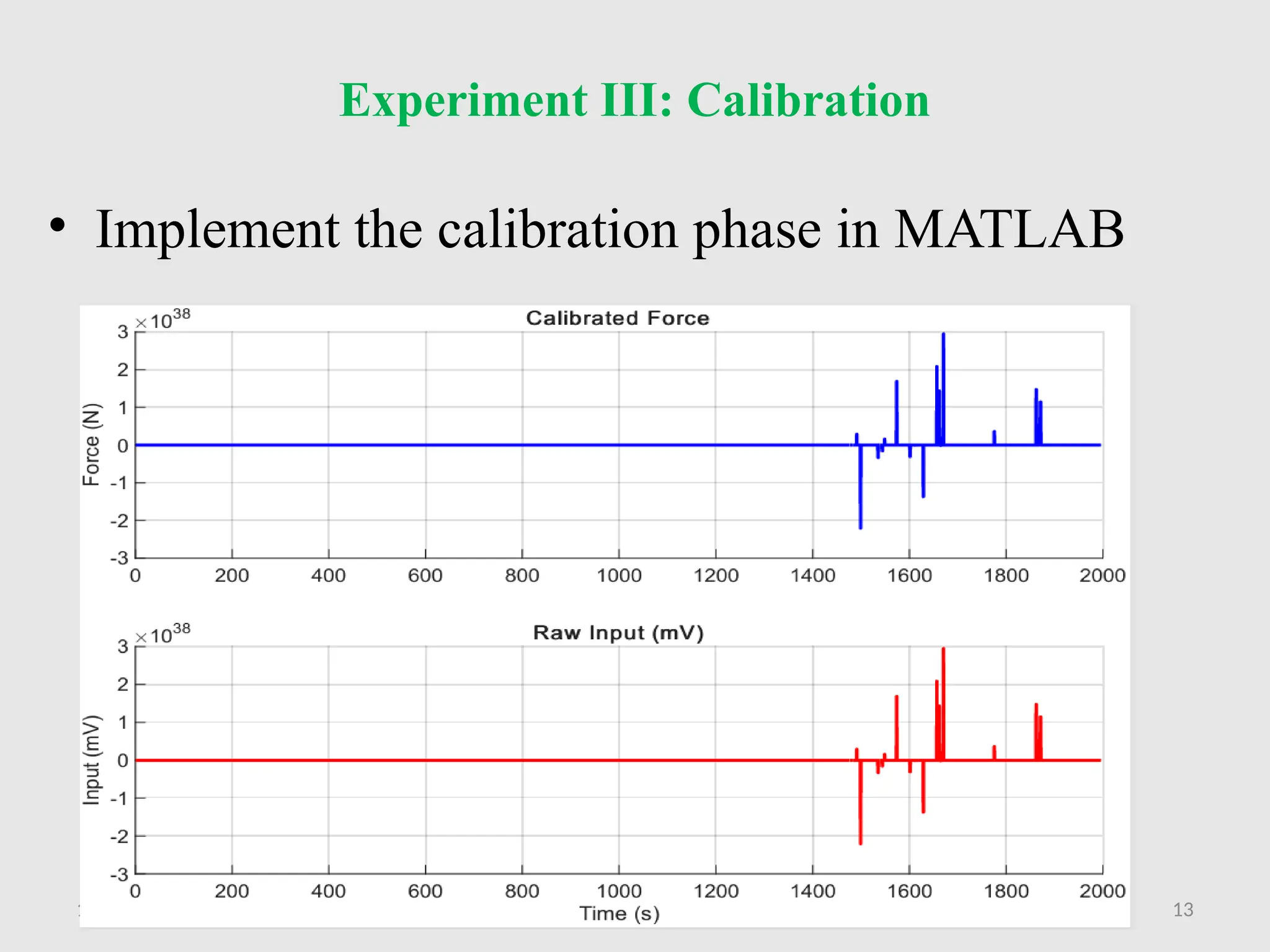
To perform calibration in MATLAB to ensure
measurement accuracy and reliability.
9
Result and discussion
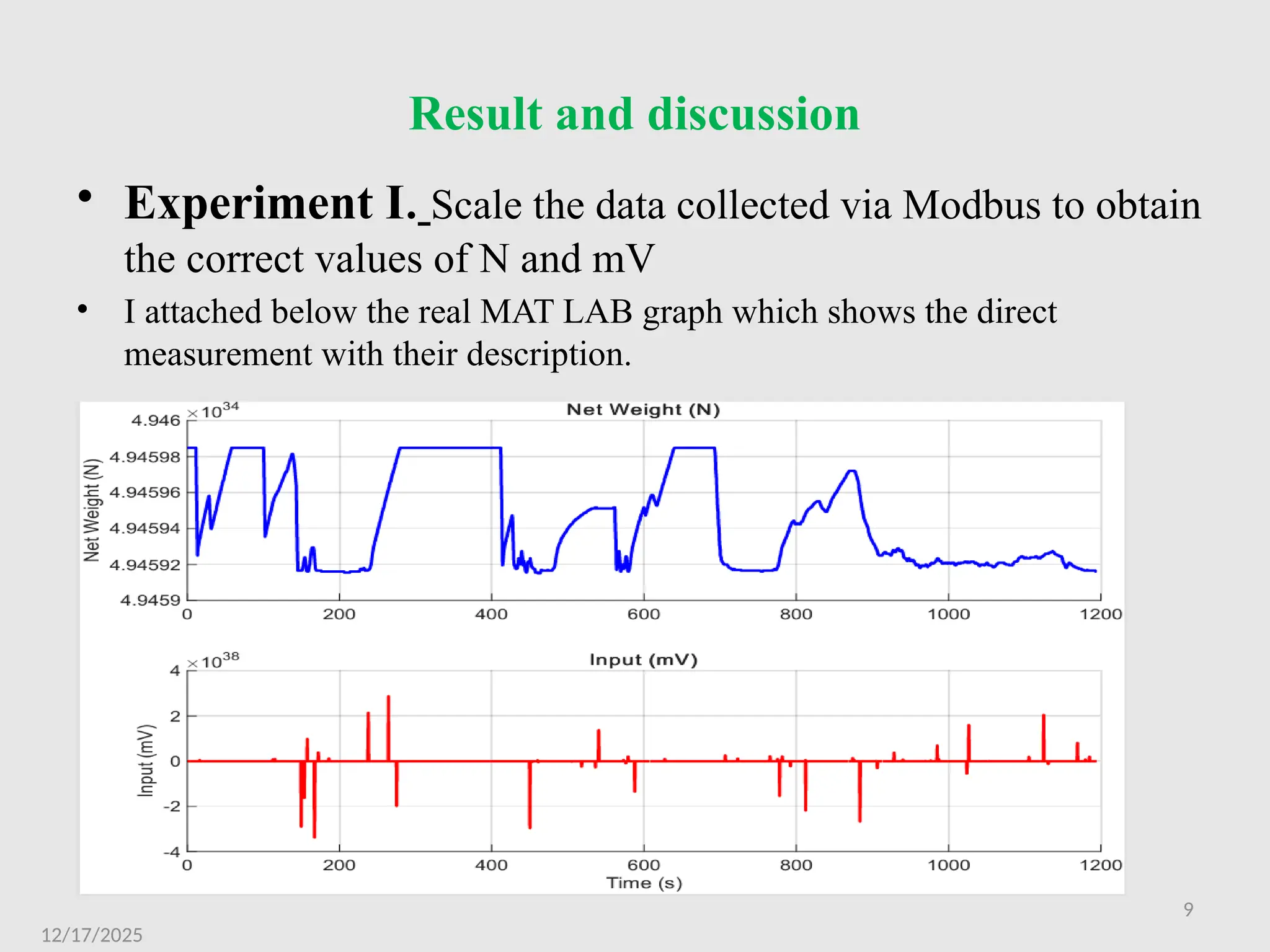
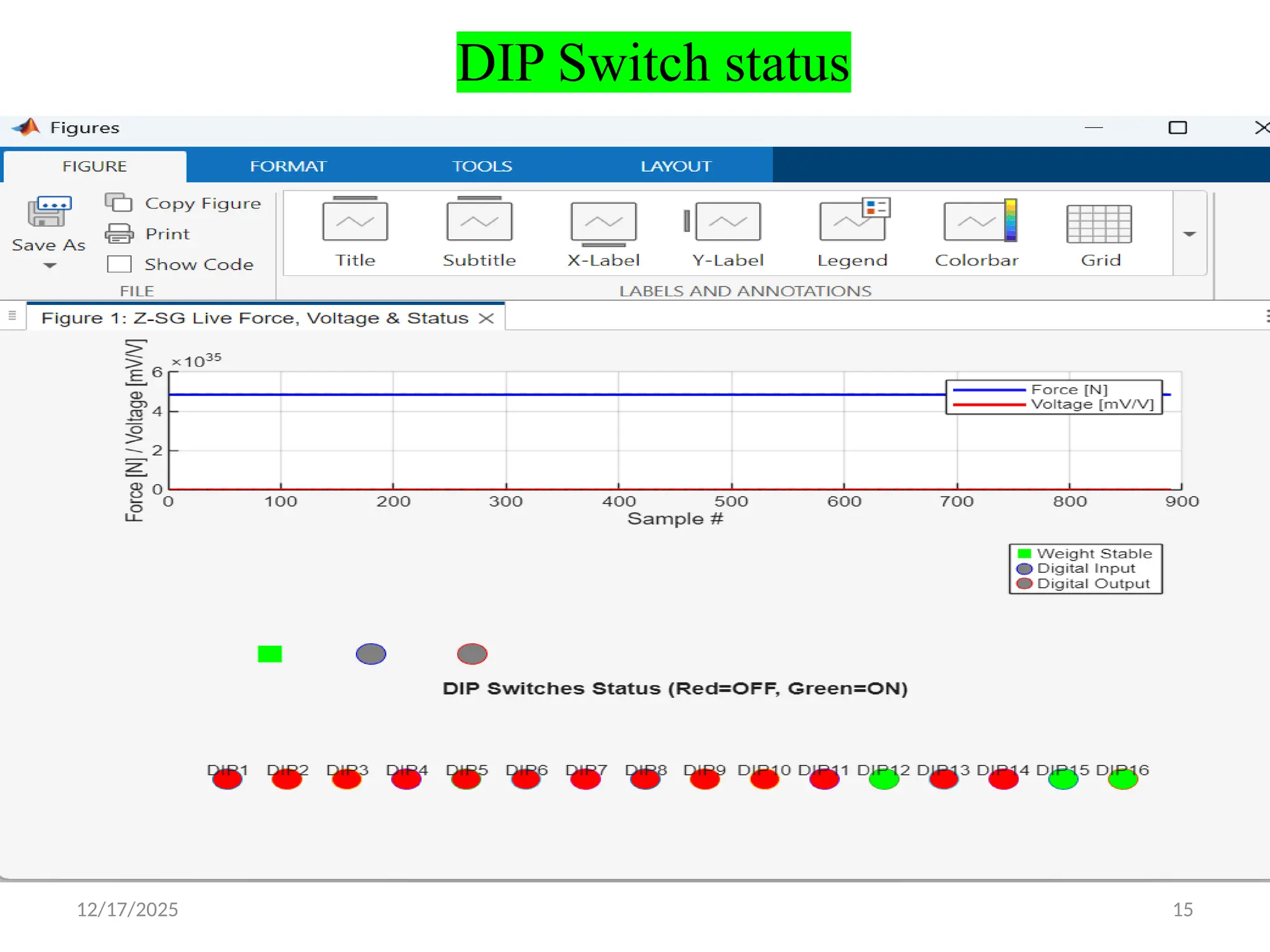
•Experiment I. Scale the data collected via Modbus to obtain
the correct values of N and mV
• I attached below the real MAT LAB graph which shows the direct
measurement with their description.
12/17/2025
12/17/2025 16
Conclusion
MATLAB-based experiments
successfullydemonstrated a complete workflow for sensor data processing—from
raw signal acquisition to calibrated force measurement.
Sequential implementation of scaling, tare correction, and calibration progressively
refined the system, achieving accurate and reliable output.
• Scaling: Modbus data conversion into N and mV produced stable measurements
with minor transient disturbances, confirming sensor consistency.
• Tare Correction: Effectively removed offsets, stabilizing net weight signals
around a baseline even during input spikes, ensuring precise repeated
measurements.
• Calibration: Converted raw millivolt readings into accurate force values,
capturing sensor response to applied loads, particularly during transient events
• .
17.
12/17/2025 17
Future work
•Noise reduction: Apply advanced filtering for cleaner
signals.
• Biomedical applications: Adapt system for monitoring
physiological forces or prosthetic load measurements.
• Automation: Integrate hardware and MATLAB into
automated measurement systems.


















![JOB PORTFOLIO_PRASHANTH_2015 [Compatibility Mode]](https://cdn.slidesharecdn.com/ss_thumbnails/cfe82d46-004b-4f25-be17-1f46c5ab1afc-150923190817-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![Agilent ADS 模擬手冊 [實習3] 壓控振盪器模擬](https://cdn.slidesharecdn.com/ss_thumbnails/3adsosc-150613072819-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)










![[BROCHURE] Italy Tour Project | @SlideON](https://cdn.slidesharecdn.com/ss_thumbnails/brochure8-251215152319-2805af68-thumbnail.jpg?width=640&height=640&fit=bounds)

















