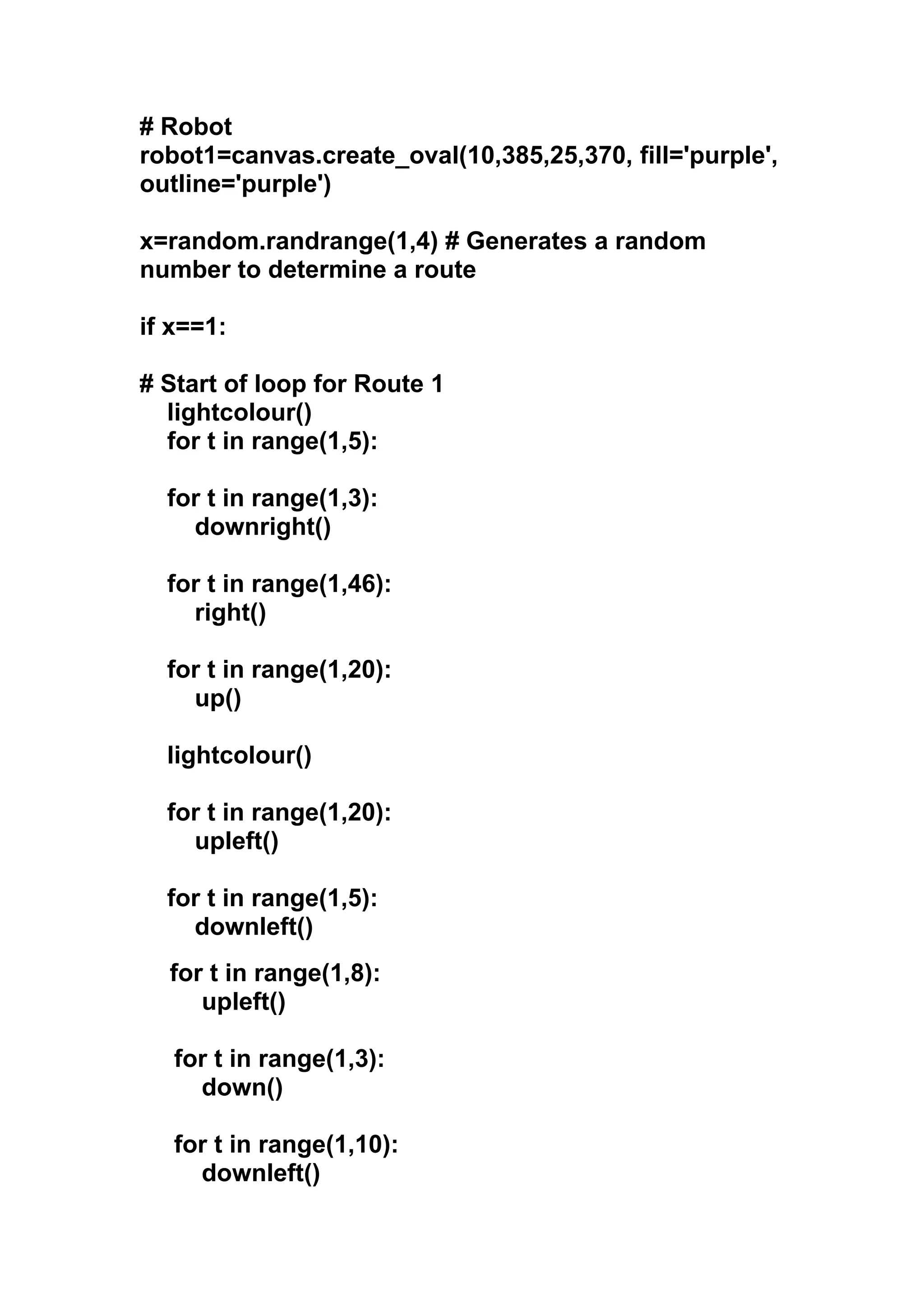
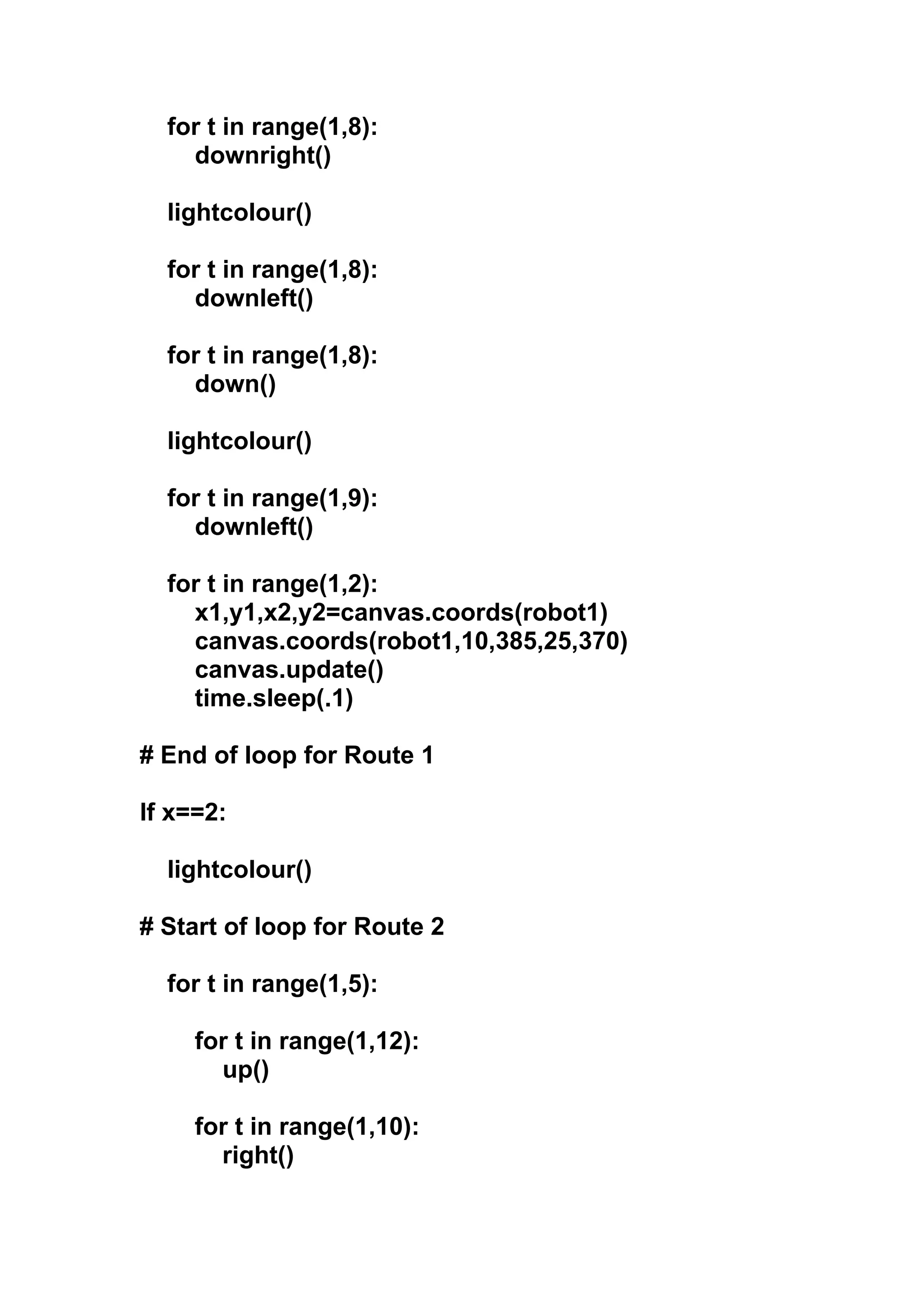
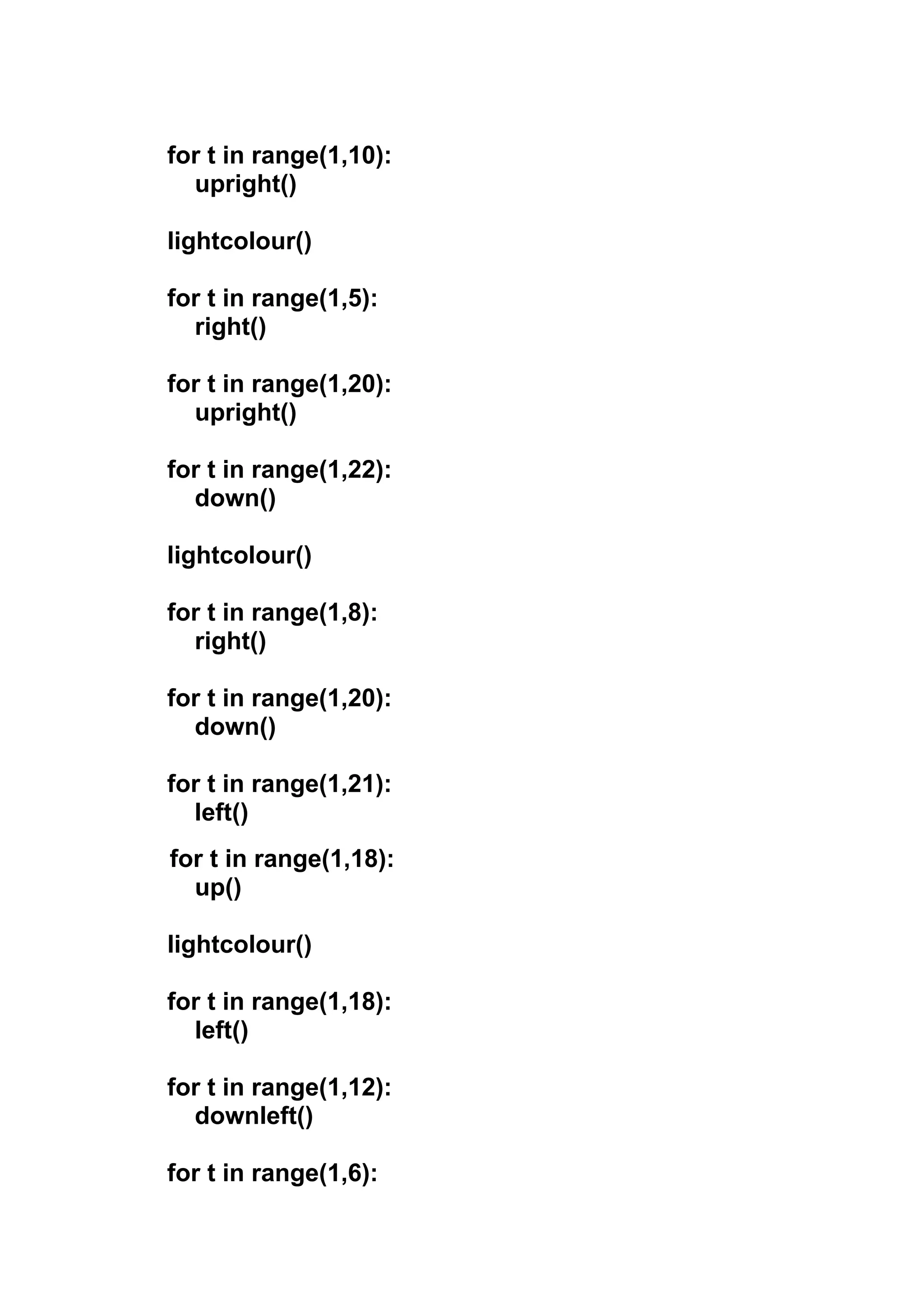
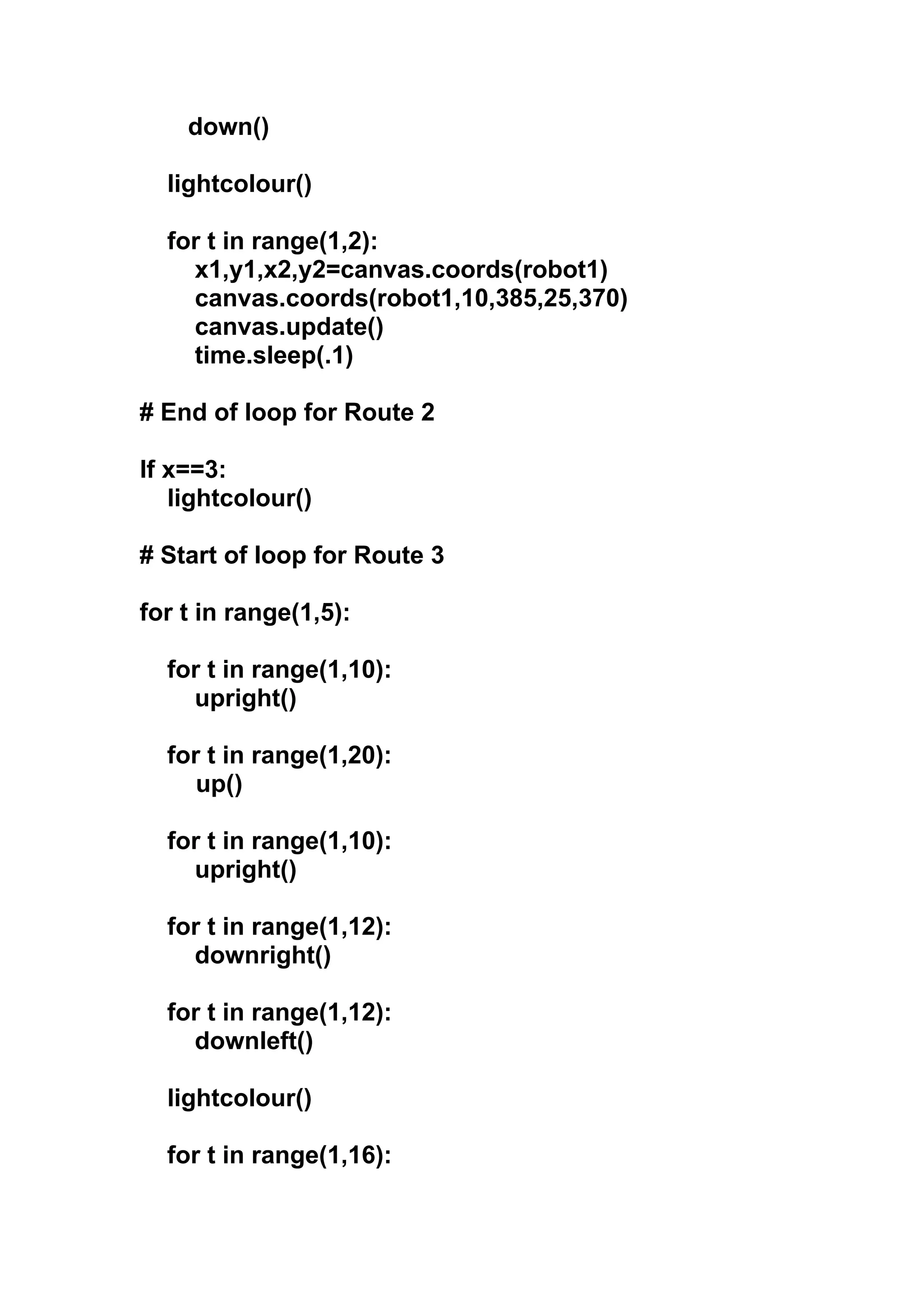
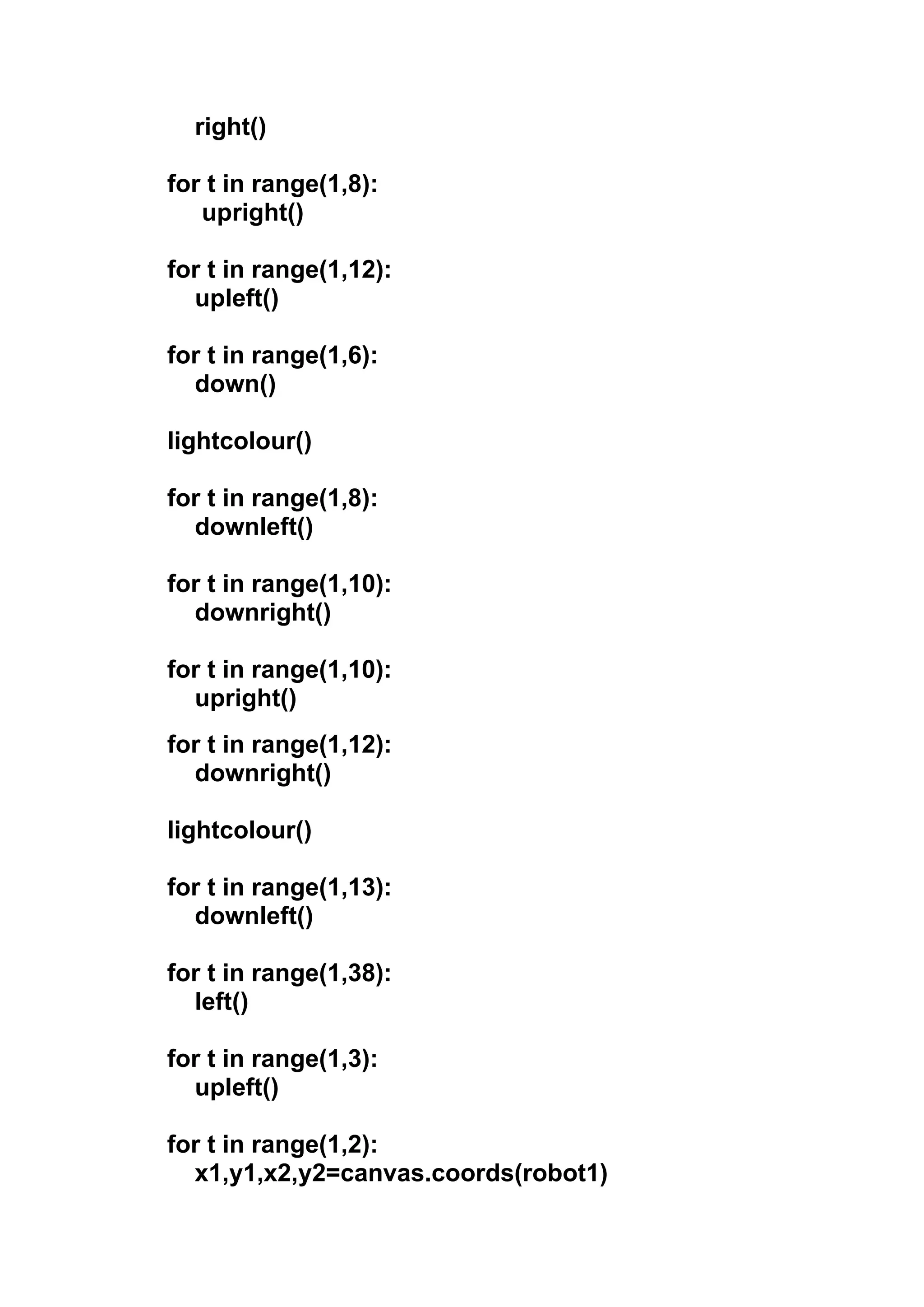
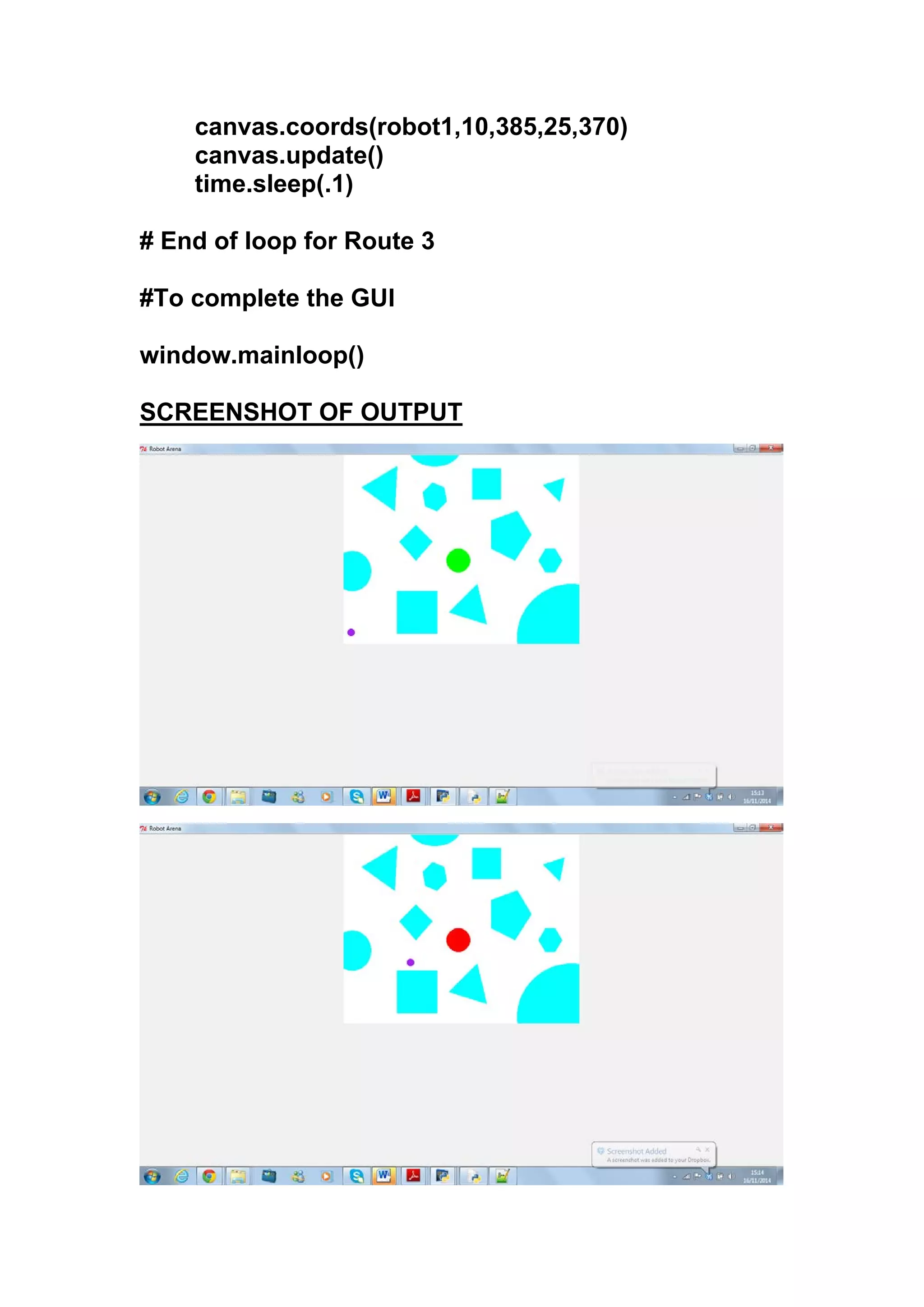
The document describes code that implements and tests a robot arena simulation GUI. It imports Tkinter for the GUI, sets up a canvas with obstacles, defines robot and traffic light objects. It then generates random routes for the robot to follow, moving it around the arena and changing the traffic light colors accordingly. The robot's movement is programmed through functions that adjust its coordinates on the canvas.








![[112] 모바일 환경에서 실시간 Portrait Segmentation 구현하기](https://cdn.slidesharecdn.com/ss_thumbnails/112-181011023345-thumbnail.jpg?width=640&height=640&fit=bounds)