Downloaded 78 times



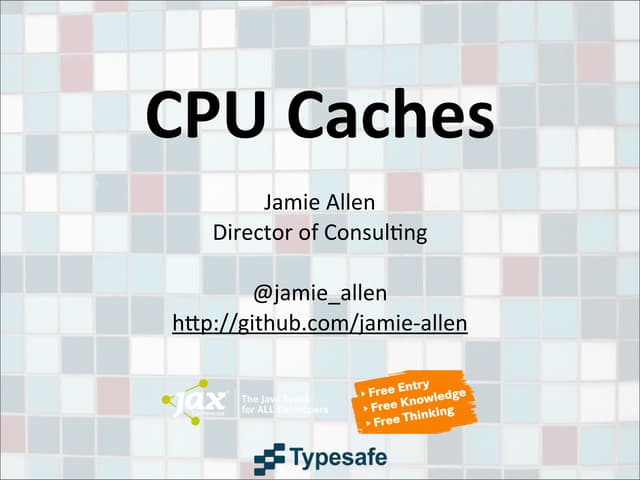
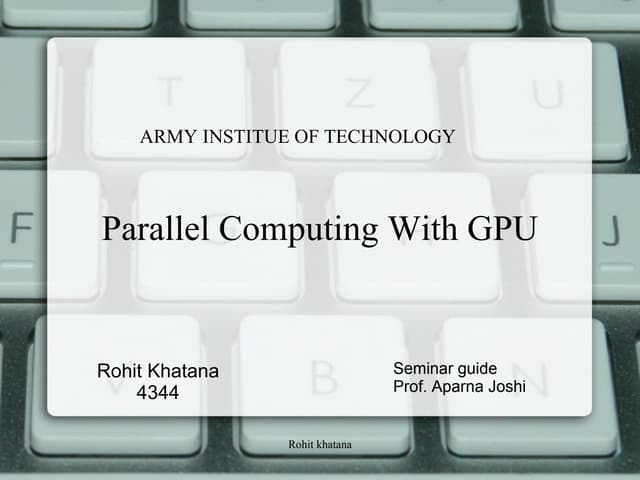
![CUDA C Example
Host Code GPU Code
Allocate &
double a[1000], *d_a;
dim3 block( 1000, 1, 1 ); Copy to GPU __global__
dim3 grid( 1, 1, 1 );
void scaleit_kernel(double *a,int n)
cudaMalloc((void**)&d_a, 1000*sizeof(double));
cudaMemcpy(d_a, a,
{
1000*sizeof(double),cudaMemcpyHostToDev
ice);
int i = threadIdx.x; My Index
scaleit_kernel<<<grid,block>>>(d_a,n); Launch
cudaMemcpy(a, d_a,
if (i < n)
Calculate
1000*sizeof(double),cudaMemcpyDeviceToH
ost);
a[i] = a[i] * 2.0l; Myself
cudaFree(d_a);
}
Copy Back & Free](https://image.slidesharecdn.com/larkintutorial-110523100034-phpapp01/75/CUG2011-Introduction-to-GPU-Computing-20-2048.jpg)

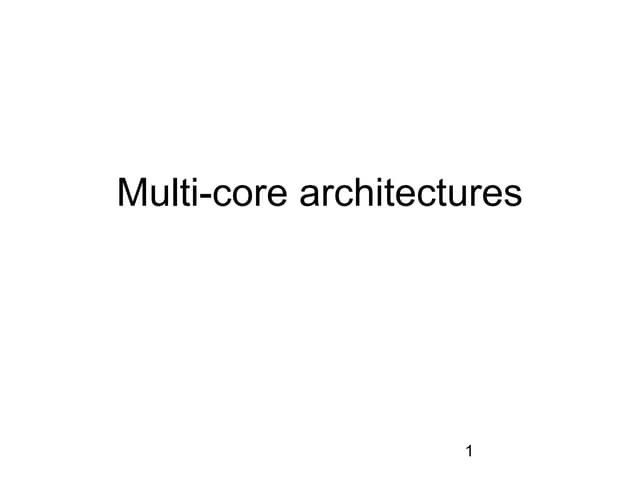
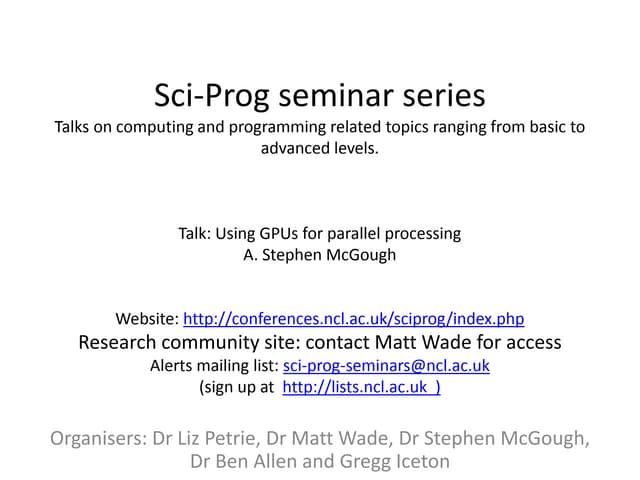
![CUDA Profiler Example
# Enable Profiler
$ export CUDA_PROFILE=1
$ aprun ./a.out
$ cat cuda_profile_0.log
# CUDA_PROFILE_LOG_VERSION 2.0
# CUDA_DEVICE 0 Tesla M2090
# TIMESTAMPFACTOR fffff6f3e9b1f6c0
method,gputime,cputime,occupancy
method=[ memcpyHtoD ] gputime=[ 2.304 ] cputime=[ 23.000 ]
method=[ _Z14scaleit_kernelPdi ] gputime=[ 4.096 ] cputime=[
15.000 ] occupancy=[ 0.667 ]
method=[ memcpyDtoH ] gputime=[ 3.072 ] cputime=[ 34.000 ]](https://image.slidesharecdn.com/larkintutorial-110523100034-phpapp01/75/CUG2011-Introduction-to-GPU-Computing-31-2048.jpg)
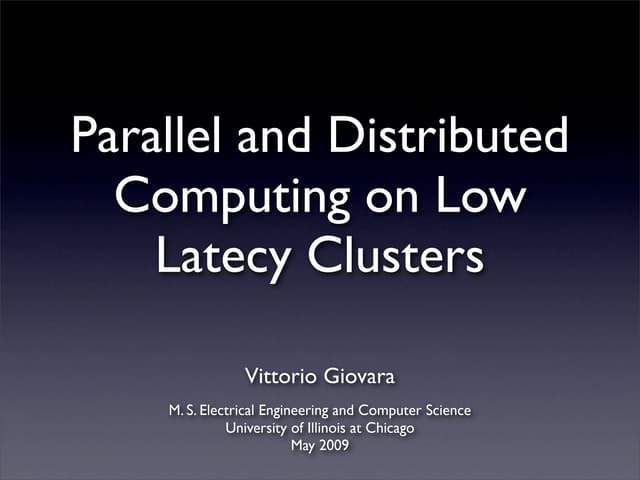
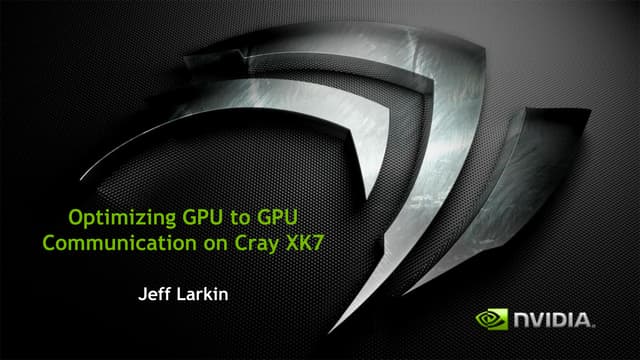
![CUDA Profiler Example
# Customize Experiment
$ cat exp.txt
l1_global_load_miss
l1_global_load_hit
$ export CUDA_PROFILE_CONFIG=exp.txt
$ aprun ./a.out
$ cat cuda_profile_0.log
# CUDA_PROFILE_LOG_VERSION 2.0
# CUDA_DEVICE 0 Tesla M2090
# TIMESTAMPFACTOR fffff6f4318519c8
method,gputime,cputime,occupancy,l1_global_load_miss,l1_global_load_hit
method=[ memcpyHtoD ] gputime=[ 2.240 ] cputime=[ 23.000 ]
method=[ _Z14scaleit_kernelPdi ] gputime=[ 4.000 ] cputime=[ 36.000 ]
occupancy=[ 0.667 ] l1_global_load_miss=[ 63 ] l1_global_load_hit=[
0 ]
method=[ memcpyDtoH ] gputime=[ 3.008 ] cputime=[ 33.000 ]](https://image.slidesharecdn.com/larkintutorial-110523100034-phpapp01/75/CUG2011-Introduction-to-GPU-Computing-32-2048.jpg)
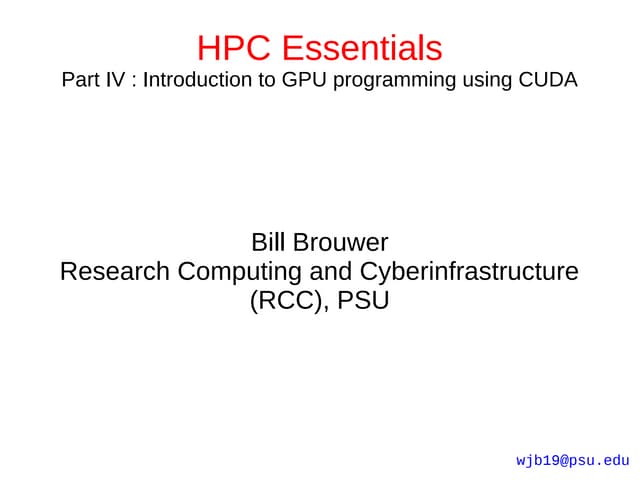
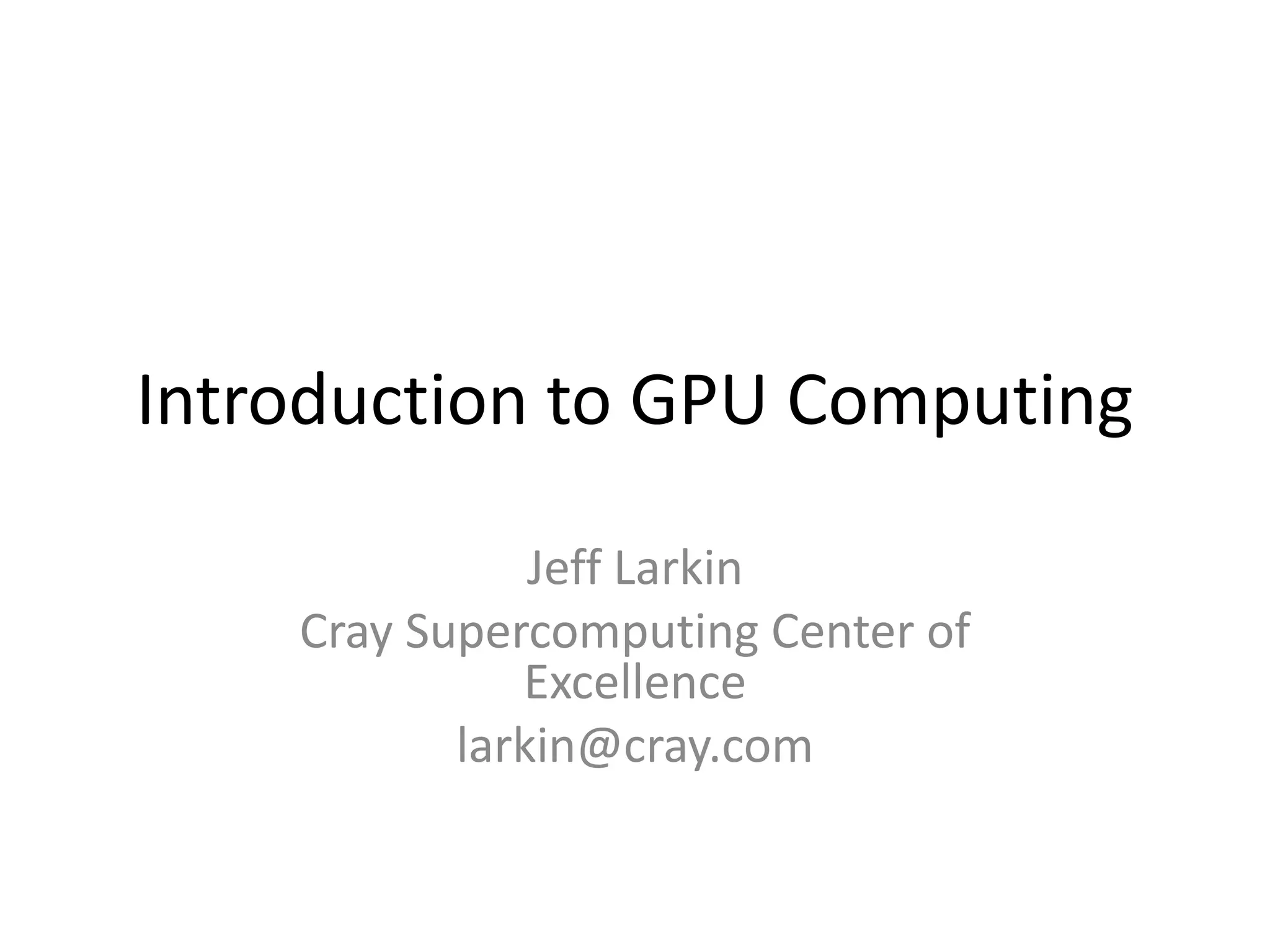
![Calculating Occupancy
1. Get the register count
ptxas info : Compiling entry function
'laplace_sphere_wk_kernel3' for 'sm_20'
ptxas info : Used 36 registers, 7808+0 bytes
smem, 88 bytes cmem[0], 768 bytes cmem[2]
2. Get the thread decomposition
blockdim = dim3( 4, 4, 26)
griddim = dim3(101, 16, 1)
3. Enter into occupancy calculator
Result: 54%](https://image.slidesharecdn.com/larkintutorial-110523100034-phpapp01/75/CUG2011-Introduction-to-GPU-Computing-40-2048.jpg)
![Simple Matrix Multiply
ptxas info : Compiling entry
attributes(global)&
subroutine mm1_kernel(C,A,B,N)
function 'mm1_kernel' for
integer, value, intent(in) :: N 'sm_20'
real(8), intent(in) ::
ptxas info : Used 22
A(N,N),B(N,N)
real(8), intent(inout) :: C(N,N) registers, 60 bytes cmem[0]
integer i,j,k
real(8) :: val
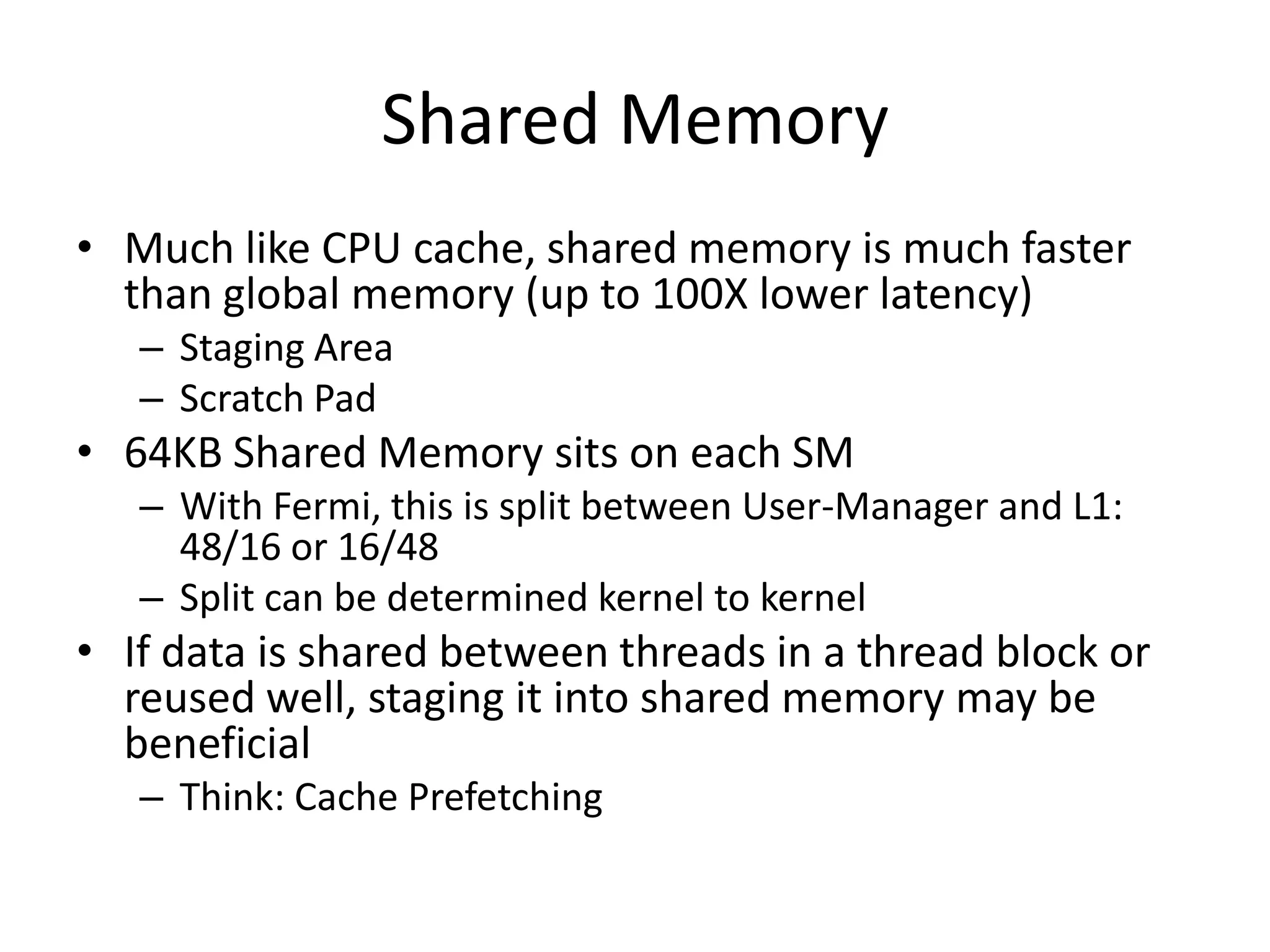
• No shared memory use,
i = (blockIdx%x - 1) * blockDim%x totally relies on
+ threadIdx%x
j = (blockIdx%y - 1) * blockDim%y
+ threadIdx%y
hardware L1
val = C(i,j) Kernel Time (ms) Occupancy
do k=1,N
val = val + A(i,k) * B(k,j) Simple 269.0917 67%
enddo
C(i,j) = val
end](https://image.slidesharecdn.com/larkintutorial-110523100034-phpapp01/75/CUG2011-Introduction-to-GPU-Computing-52-2048.jpg)
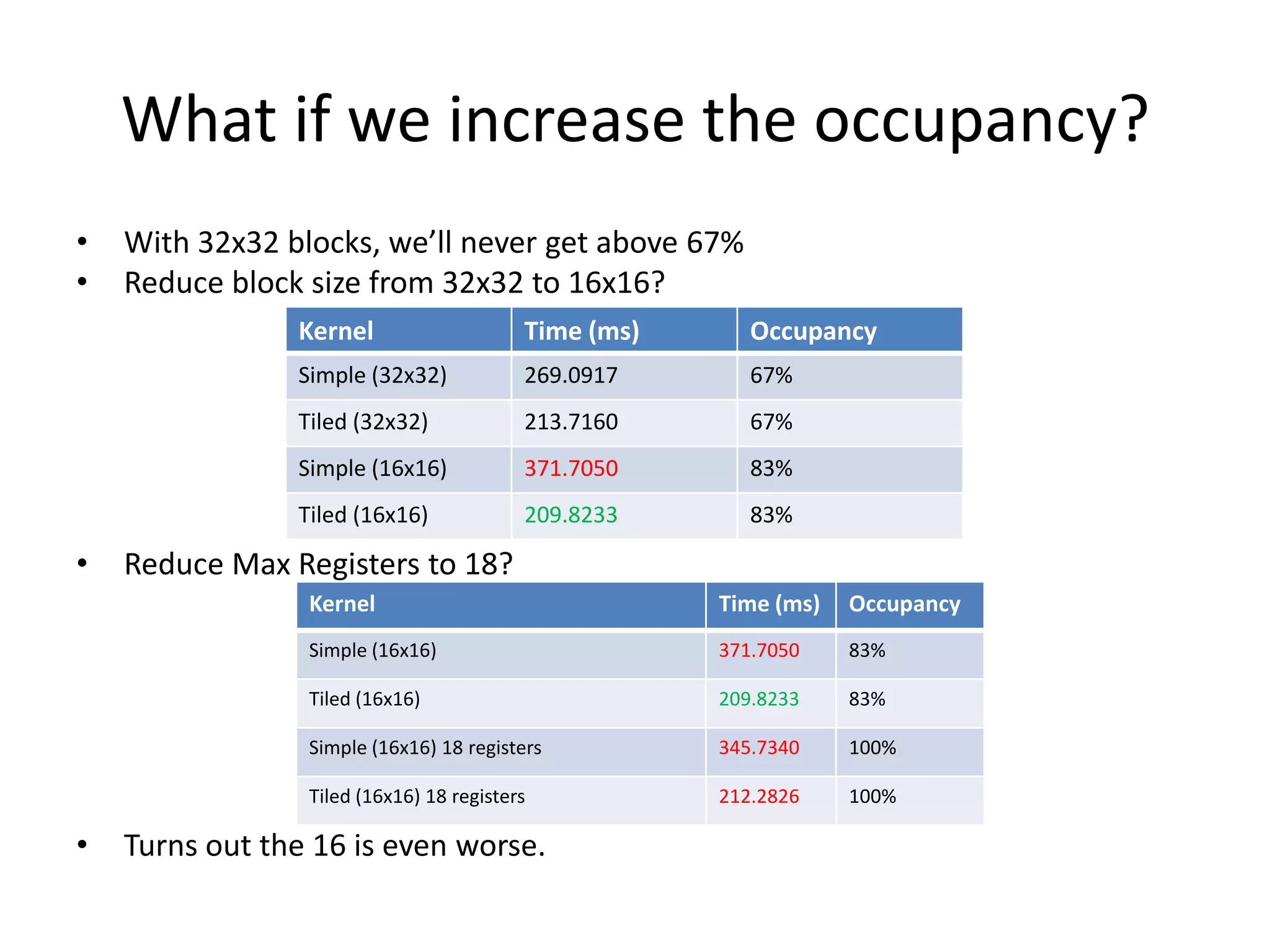
![Tiled Matrix Multiply
ptxas info : Compiling entry
integer,parameter :: M = 32
real(8),shared :: AS(M,M),BS(M,M) function 'mm2_kernel' for
real(8) :: val 'sm_20'
val = C(i,j) ptxas info : Used 18
registers, 16384+0 bytes
do blk=1,N,M
AS(threadIdx%x,threadIdx%y) = & smem, 60 bytes cmem[0], 4
A(blk+threadIdx%x-1,blk+threadIdx%y-1) bytes cmem[16]
BS(threadIdx%x,threadIdx%y) = &
B(blk+threadIdx%x-1,blk+threadIdx%y-1)
call syncthreads() • Now uses 16K of shared
do k=1,M
val = val + AS(threadIdx%x,k) &
memory
* BS(k,threadIdx%y)
enddo Kernel Time (ms) Occupancy
call syncthreads()
enddo Simple 269.0917 67%
C(i,j) = val
endif
Tiled 213.7160 67%](https://image.slidesharecdn.com/larkintutorial-110523100034-phpapp01/75/CUG2011-Introduction-to-GPU-Computing-53-2048.jpg)

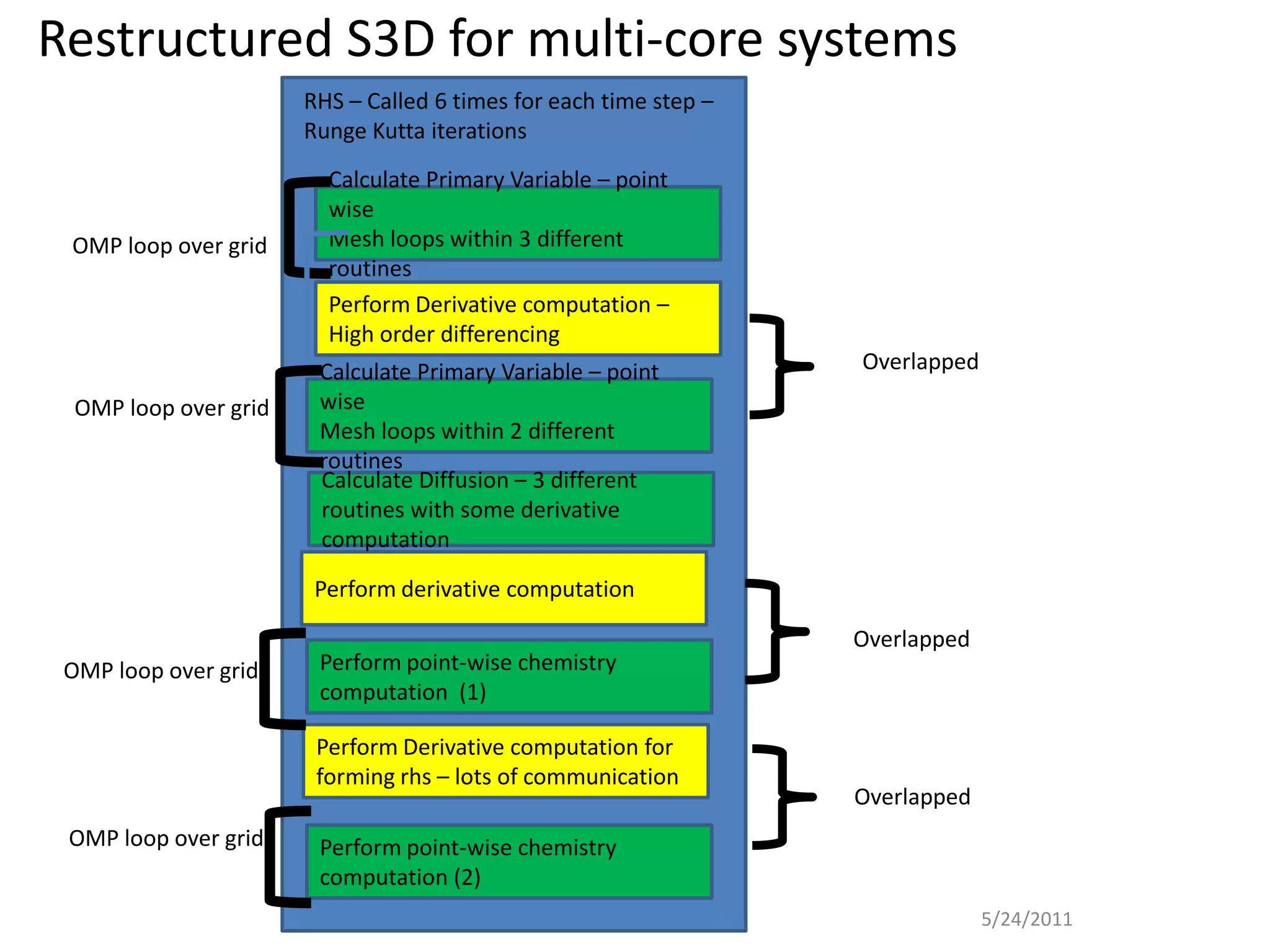
This document provides an introduction to GPU computing. It discusses the architectural differences between CPUs and GPUs and when each is better suited for certain tasks. It also overview several GPU programming models such as CUDA, OpenCL, and directives. Finally, it discusses approaches for analyzing GPU performance, including using explicit events, the CUDA profiler, and CrayPAT tools.