580 California St., Suite 400
San Francisco, CA, 94104
This research area investigates the formalization and implementation of multi-target tracking filters based on labeled random finite sets (RFSs), which treat the multi-object state as a finite set of labeled individual target states. The goal is to obtain Bayes-optimal filtering recursions that estimate both the number of targets and their trajectories while handling data association uncertainty, clutter, and detection imperfections, and enabling track continuity through labeling. Efficient implementations via conjugate priors and tractable approximations are crucial for applying these theoretically optimal filters to real-world high-dimensional tracking scenarios.
This line of research focuses on algorithmic and computational strategies to realize the theoretically optimal labeled RFS-based filters in practice. Key challenges include the combinatorial explosion in the number of hypotheses during data association and prediction, as well as efficient truncation, parallelization, and adaptive birth handling. Methods such as ranked assignment, K-shortest paths algorithms, particle filters, and data-driven birth models are explored to balance accuracy and computational feasibility.
This emerging research area explores broader theoretical frameworks for randomness, random object generation, and sampling that may underpin random finite set models. It involves abstracting random entities beyond numeric values to structured objects such as graphs or symbolic sequences, investigating methods for uniform random generation, and studying stochastic geometric properties that relate to finite sets. This theme bridges RFS theory with random combinatorial structures, complexity measures, and randomness perception.
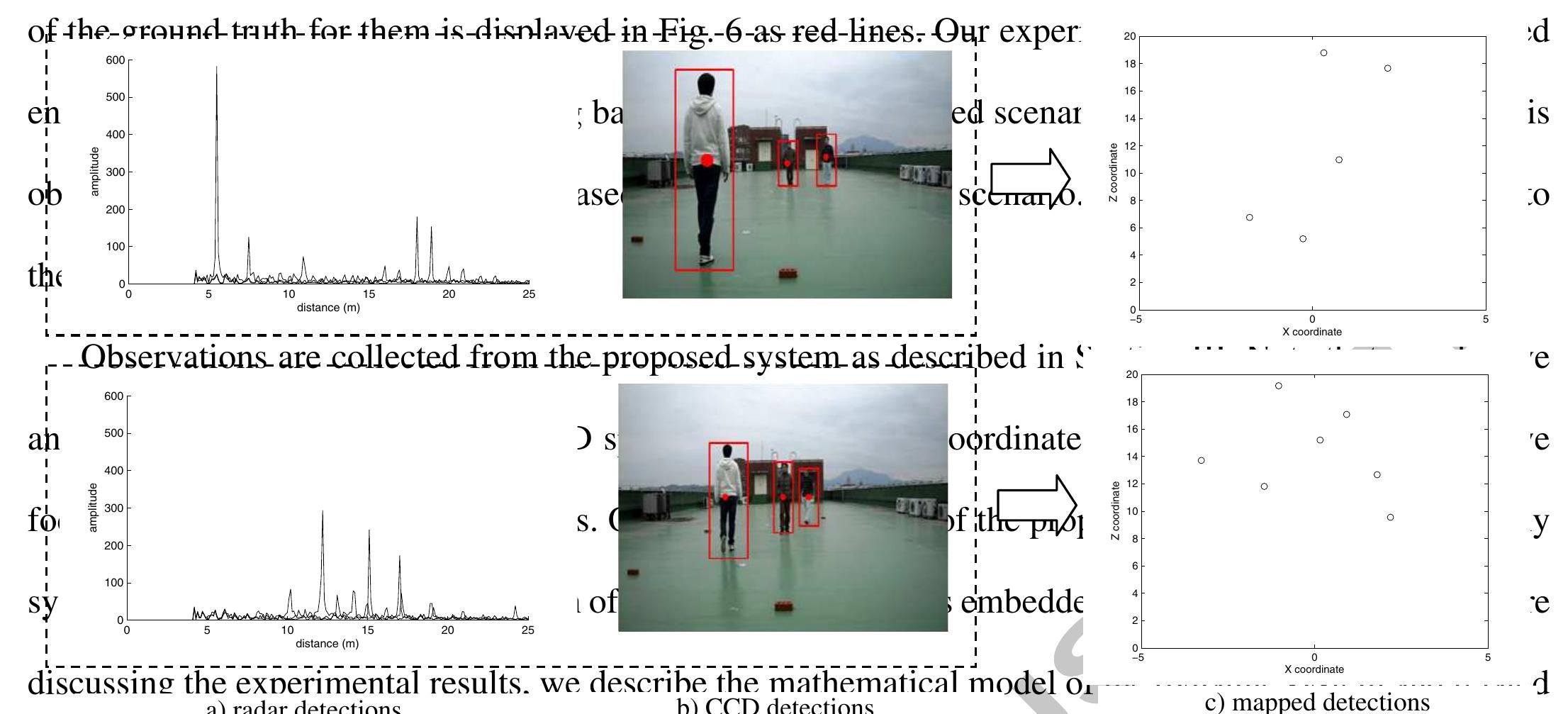
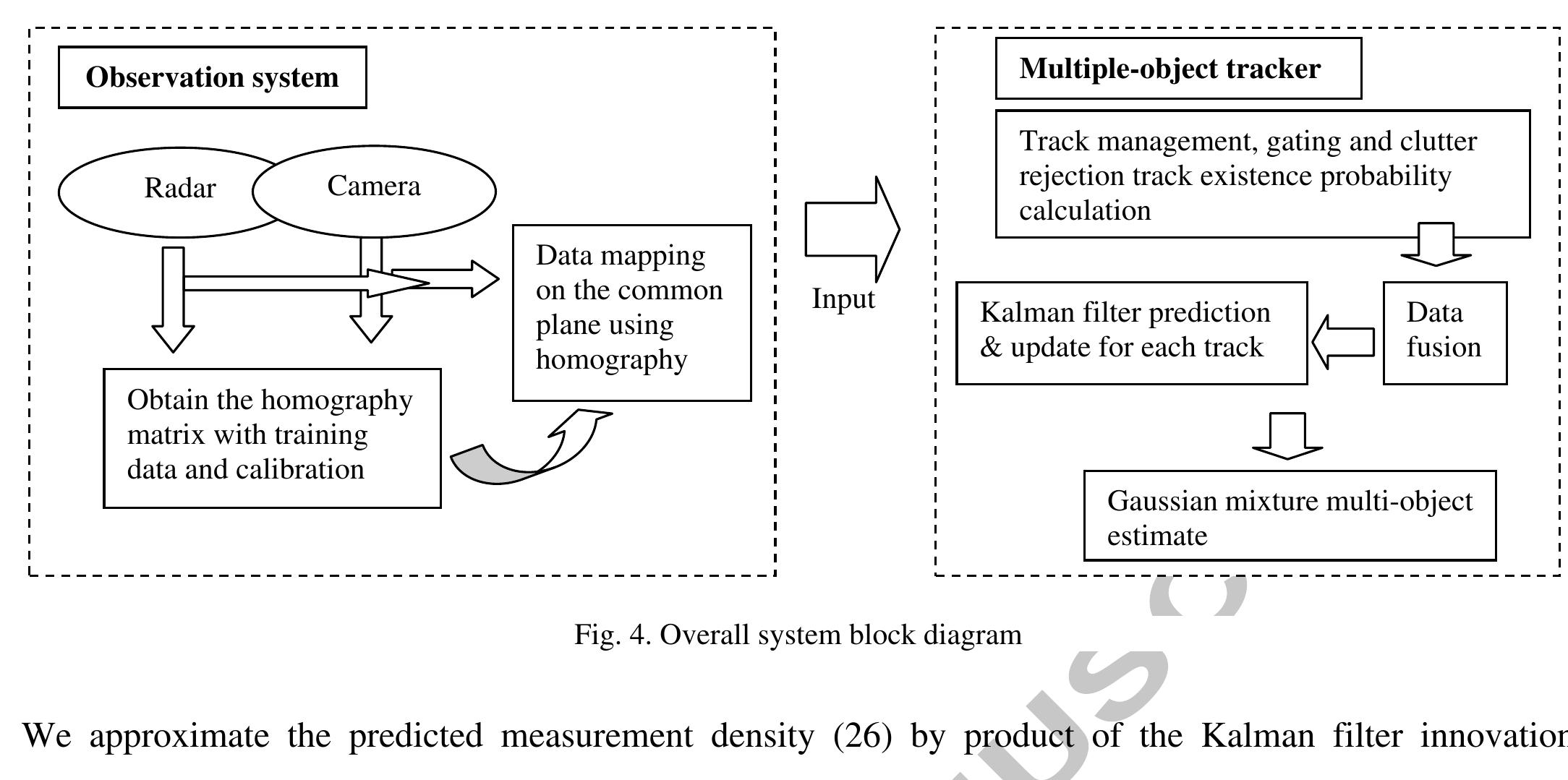
![noises that are not taken into account in [30]. In tracking problems with multisensory observations, dat](https://figures.academia-assets.com/106055994/figure_002.jpg)
![Kalman-filter-based heterogeneous multi-sensor navigation,” JEEE Trans. Aerospace and Electronic Systems, vol. 49, no. 4, [36]Zhou, Zebo, Li, Yong, Liu, Junning, and Li, Gun, “Equality constrained robust measurement fusion for adaptive](https://figures.academia-assets.com/106055994/table_001.jpg)
![Fig. 4. GOSPA metric and component errors over time using cutoff distance c = 20 [pixel], order p = 2, and a = 2.](https://figures.academia-assets.com/91605423/figure_004.jpg)